|
|
| (27 intermediate revisions not shown) |
| Line 1: |
Line 1: |
| - | = Chapter 1 DE10-Advanced Development Kit = | + | = <span style="color:#000080;">Chpater1 Install Lithium Battery</span> = |
| - | The DE10-Advanced Development Kit provides users a combination of ARM software and FPGA hardware development platforms. It has a vast memory device and peripherals on the hardware. This kit also includes resourceful reference designs to help users to accomplish their design needs. The hardware offers in the DE10-Advanced has the maximum capacity with 660K Les in Arria 10 SoC FPGA and featuring various types of high-speed image interface such as: HDMI, Display Port, and 12G-SDI and a large capacity of DDR4 memory. The board’s high speed network interface, Gigabit Ethernet and SFP+10GbE, provides hardware resources for network communications related applications.
| + | |
| | | | |
| - | The HPS can be reboot with any of these three removable daughter cards: MicroSD Card, Nand Flash, and QSPI Flash. The FPGA on the main board can be connected to DDR4-SODIMM Socket in addition to the DDR4 memory module. The FPGA on the main board can also be connected to the Terasic QDR Memory Module as well. Beside the DDR4 memory module, you can also directly connect to the FPGA on the main board via the High Pin Count FMC expansion port to expand variety of functions.
| |
| | | | |
| - | The PCIe Gen3 x4 Connector interface comes with the Terasic PCA PCIe and PCIe Cable, which can be used to connect the Host PC to allow data between the FPGA and the Host PC. The USB Type-C interface on the motherboard allows the motherboard to obtain power for the host PC. The Host PC displays information and images through the high-speed transmission USB 3.0 or the Display Port. | + | The Self-Balancing Robot’s main power source is a lithium battery pack with three 12 V series 18650 batteries. For safety reasons, the lithium batterie are not included in the development kit. Users need to purchase three 18650 3.7V Lithium-Ion battery for the robot. The following linked products can be used as a reference for purchase: |
| - | ==1.1 Package Contents==
| + | |
| - | [[File:De10 advanced kit contents revc.jpg|700px]]
| + | |
| - | #DE10-Advanced SoC FPGA Development Kit
| + | |
| - | #MicroSD Card (Installed)
| + | |
| - | #Fan (Installed)
| + | |
| - | #Two Type A to Mini-B USB Cables
| + | |
| - | #12V DC Power Supply (Installed)
| + | |
| - | #AC Power Cord (USA)
| + | |
| - | #One 4GB DDR4 ECC SO-DIMM Module (Installed)
| + | |
| - | #Screws, Copper Stands, and Silicon Footstands
| + | |
| - | ==1.2 DE10-Advanced System CD==
| + | |
| - | The DE10-Advanced System CD contains all the documents and supporting materials associated with DE10-Advanced, including the user manual, system builder, reference designs and device datasheets. Users can download this system CD from the link: http://DE10-Advanced.terasic.com/cd.
| + | |
| | | | |
| - | ==1.3 Getting Help==
| |
| - | *Here are the addresses where you can get help if you encounter any problems:
| |
| - | *:
| |
| - | **Terasic Technologies
| |
| - | *:
| |
| - | **9F., No.176, Sec.2, Gongdao 5th Rd, East Dist, Hsinchu City, 30070. Taiwan
| |
| - | *:
| |
| - | **Email: support@terasic.com
| |
| - | *:
| |
| - | **Tel.: +886-3-575-0880
| |
| - | *:
| |
| - | **Website: DE10-Advanced.terasic.com
| |
| | | | |
| - | = Chapter 2 Introduction of the DE10-Advanced Board=
| + | [https://www.digikey.com/product-detail/en/sparkfun-electronics/PRT-12895/1568-1488-ND/5271298 https://www.digikey.com/product-detail/en/sparkfun-electronics/PRT-12895/1568-1488-ND/5271298] |
| - | This chapter provides an introduction to the features and design characteristics of the board.
| + | |
| - | ==2.1 Layout and Components==
| + | |
| - | Figure 2-1 and Figure 2-2 shows a photograph of the board. It depicts the layout of the board and indicates the location of the connectors and key components.
| + | |
| | | | |
| - | [[File:De10 advanced revc layout top.jpg|720px]]
| |
| | | | |
| - | :::::::Figure 2-1 DE10-Advanced development board (top view) | + | <span style="color:#0000ff;">'''Note that only the 18650 batteries with a length of 65 mm can be installed in the battery case on the robot. Do not purchase batteries longer than this length, otherwise they will not fit into the battery case.'''</span> |
| | | | |
| - | ::::[[File:De10 advanced revc layout bot.jpg|520px]]
| |
| | | | |
| - | ::::::Figure 2-2 DE10-Advanced development board (bottom view) | + | <div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_1.png|400px]]</div> |
| | | | |
| - | The DE10-Advanced board has many features that allow users to implement a wide range of designed circuits, from simple circuits to various multimedia projects.
| |
| | | | |
| - | The following hardwares are provided on the board:
| + | Next, please open the balance car's kit packaging, remove the robot. Remove the lithium battery case from the Self-Balancing Robot, install the battery and reload it into the car. |
| | | | |
| - | *'''FPGA Device'''
| + | Detailed steps are as follows: |
| - | **Intel ® Arria10® SoC 10AS066K3F40E2SG device (660K LEs)
| + | == 1-1 Remove the lithium battery case == |
| - | **USB-Blaster II onboard for programming; JTAG Mode
| + | |
| - | **Serial configuration device – EPCQL1024
| + | |
| - | **One DDR4 SO-DIMM Socket, support ECC
| + | |
| - | **On-board 1GB DDR4-2400, 32-bit data width
| + | |
| - | **USB Type-C Interface
| + | |
| - | **Power Delivery
| + | |
| - | **DisplayPort TX/RX with 4 lanes
| + | |
| - | **USB 3.0/2.0
| + | |
| - | **HDMI TX/RX 2.0 for 4K2K@60- FPGA Transceiver
| + | |
| - | **PCIe Cabling Socket at Gen3 x4
| + | |
| - | **SFP+ Socket x4, 40Gbps
| + | |
| - | **SATA 3.0 Host and SATA Device x2 (SATA Connector x4)
| + | |
| - | **One Gigabit Ethernet Port
| + | |
| - | **SMA Clock-In and Clock-Out
| + | |
| - | **High Pin Count FMC Connector. Support VADJ 1.2V/1.5V/1.8V.
| + | |
| - | **Accelerometer, Gyroscope and Magnetometer
| + | |
| - | **Temperature Sensor
| + | |
| - | **Fan Control
| + | |
| - | **LED x2, KEY x2, Switch x2, 7-Segment x2
| + | |
| | | | |
| - | *'''HPS (Hard Processor System)'''
| |
| - | **1.5GHz Dual-core ARM Cortex-A9 processor
| |
| - | **Boost Flash Slot:
| |
| - | **1024 Mb QSPI Flash
| |
| - | **Nand Flash
| |
| - | **MicroSD Socket
| |
| - | **On-board 1GB DDR4-2400, 32-bit data width
| |
| - | **1 Gigabit Ethernet PHY with RJ45 connector
| |
| - | **USB OTG Port, USB mini-AB connector
| |
| - | **UART to USB, USB Mini-B connector
| |
| - | **RTC
| |
| - | **One user button and one user LED
| |
| - | **Warm reset button and cold reset button
| |
| | | | |
| - | ==2.2 Block Diagram of the DE10-Advanced Board==
| + | # Remove the package box from the robot, |
| - | Figure 2-3 is the block diagram of the board. All the connections are established through the Arria 10 SoC FPGA device to provide maximum flexibility for users.
| + | #: |
| - | Users can configure the FPGA to implement any system design.
| + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_2.png|400px]]</div> |
| | + | #: |
| | + | #: |
| | + | # Release the Velcro, take the strap off of the lithium battery case. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_3.png|400px]]</div> |
| | + | #: |
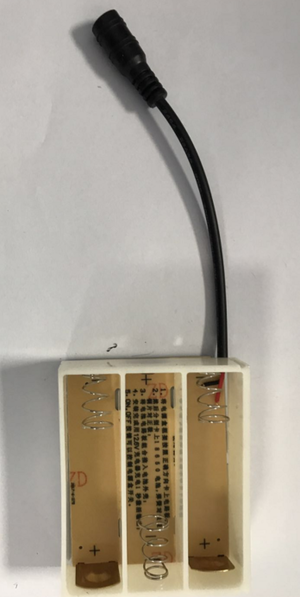
| | + | # The Battery case parts distribution is shown below after removing the battery case. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_4.png|500px]]</div> |
| | + | #: |
| | | | |
| - | [[File:De10 advanced revc block diagram.jpg|500px]]
| + | == 1-2 Install the batteries into the lithium battery case == |
| | | | |
| - | ::::Figure 2-3 Block diagram of DE10-Advanced
| |
| | | | |
| | + | # The purpose of the lithium battery case is to prevent the lithium battery from exceed the safety value while charging; at the same time, it also protects the battery from damage in case the voltage is too low. When first opening the balance car package, the lithium batteries are not in the battery case. The users need to install the three 18650 lithium battery into the battery case. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | # The battery compartment has a slot design. The black cover will secure the white battery holder. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_5.png|300px]]</div> |
| | + | #: |
| | + | # We suggest users open the battery case with both hands. First, locate the little slots on the left and right sides of the battery case. Second, slightly push the cover outward to take it out of #:the battery compartment. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_6.png|400px]]</div> |
| | + | # Use the left and right middle fingers to slightly push the center tabs out. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_7.png|400px]]</div> |
| | + | # Next, use both thumbs to push the white battery compartment forward, and then the battery case should be opened. The battery cover and compartment can be connected tightly; therefore, users might need to use more strength. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_8.png|400px]]</div> |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_9.png|400px]]</div> |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_10.jpg|400px]]</div> |
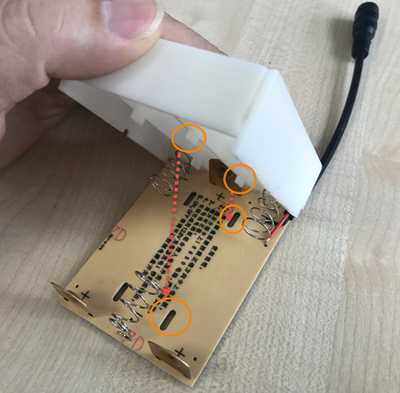
| | + | # Remove the battery compartment. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;margin-left:0.635cm;margin-right:0cm;">[[Image: BAL_01_Battery_Installation_Guide_pic_11.png|300px]]</div> |
| | + | #: |
| | + | #:<div style="margin-left:0.635cm;margin-right:0cm;">The battery case contains two parts: the battery cover and a PCB board. If it becomes lose, you can follow the picture below to put it back together.</div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_12.png|400px]]</div> |
| | + | # Prepare three 18650 lithium batteries and follow the instructions to insert the batteries positive and negative sides accordingly. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_13.png|400px]]</div> |
| | + | #: |
| | + | #:<div style="margin-left:0.635cm;margin-right:0cm;">The positive and negative battery installation and distribution are as follows:</div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_14.png|300px]]</div> |
| | + | #: |
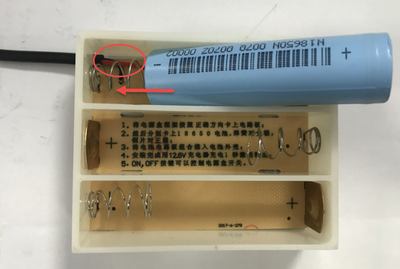
| | + | #:<div style="margin-left:0.635cm;margin-right:0cm;">'''Note,''' in the slot with the power cord the battery will not go in as easily due to the wire connection, be sure to push harder on the battery to ensure that is goes into the slot. </div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_15.png|400px]]</div> |
| | + | # After the batteries are inserted, please double check the batteries positive and negative polarity on each battery are positioned correctly. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;margin-left:0.635cm;margin-right:0cm;">[[Image: BAL_01_Battery_Installation_Guide_pic_16.png|200px]]</div> |
| | + | # Make sure the back of the PCB has good bonding with the battery cover and can be closed smoothly. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_17.png|400px]]</div> |
| | + | # When replacing the battery cover, please make sure that the power cord has a notched position corresponding to the case. This allows the case to be reassembled without damaging the power cord or the case. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_18.png|300px]]</div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_19.png|400px]]</div> |
| | + | # <span style="color:#ff0000;">'''Caution!'''</span><span style="color:#ff0000;"> Despite the charging status, batteries need to be connected to a charger due to the circuit design of the battery to activate the output voltage circuit. Otherwise, there will be no power output. The battery box needs to stay connected to the charger for at least 1 second. If there is no battery replacement, then users do not need to repeat this step.</span> |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_20.png|400px]]</div> |
| | + | #: |
| | | | |
| - | Detailed information about Figure 2-3 are listed below.
| + | == 1-3 Insert the lithium battery case back into the robot == |
| | | | |
| - | *Arria 10 SoC 10AS066K3F40E2SG/10AS057K3F40E2SG FPGA
| |
| - | **Dual-core ARM Cortex-A9 (HPS)
| |
| - | **660K programmable logic elements
| |
| - | **42,660 Kbits embedded memory
| |
| - | **Hard memory controllers x5
| |
| - | **Transceivers x48(17.4 Gbps)
| |
| - | **18-bit x 19-bit multipliers x3,356
| |
| - | **Accelerometer & Gyroscope Device MPU9250
| |
| | | | |
| - | *Configuration
| + | # Once the battery case has been reassembled, follow the picture illustration below to place the battery case back into the robot. Please make sure to place the battery case in empty space in the middle of the robot, as indicated in the picture. This action will ensure that the wires are neatly placed in the proper location. |
| - | **EPCQ1024L Serial Configuration Device
| + | #: |
| - | **Onboard USB-Blaster II (Mini-B USB connector)
| + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;margin-left:0.635cm;margin-right:0cm;">[[Image: BAL_01_Battery_Installation_Guide_pic_21.png|400px]]</div> |
| | + | # Insert the blue Velcro strap (with the plush side up) between the battery and the robot. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_22.png|400px]]</div> |
| | + | # Pay attention to the power cord tied to the cable tie in the back of the car. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_23.png|400px]]</div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_24.png|400px]]</div> |
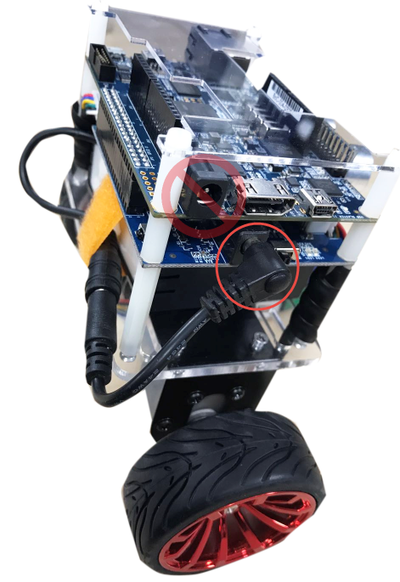
| | + | # To tighten and secure the lithium battery box and the body, tie Velcro from the bottom of the body back to the front body through the black ring. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_25.png|400px]]</div> |
| | + | # Tie the Velcro down to secure the battery case. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_26.png|400px]]</div> |
| | + | # Users can adjust the black ring to their desire spot. It’s the best to tie it securely to the body. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_27.png|400px]]</div> |
| | + | # Use the DC power cable (can be found in the Package Box) to connect the lithium battery case to robot’s power input. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_28.png|400px]]</div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_29.png|400px]]</div> |
| | + | #: |
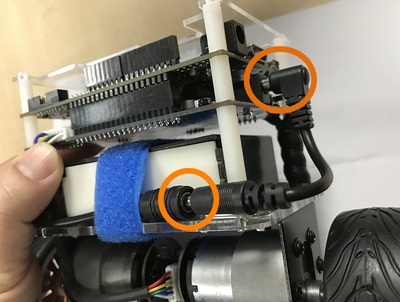
| | + | #:Please note that do not plug the DC power cable into the DE10-Nano 5V power jack |
| | + | #: |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_30.png|400px]]</div> |
| | + | #: |
| | + | #: |
| | + | # To test whether the battery has normal power supply or not, turn the system power switch to the right. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_31.png|400px]]</div> |
| | + | # If the power is normal, users will see the green LED lit up; the DE10-Nano blue power light will also be lit up. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_32.png|400px]]</div> |
| | + | # If the LEDs fail to be lit up: |
| | + | ## Please check if the DC power cable is connected properly. |
| | + | ## Every time the batteries are installed, please make sure the battery charger is attached to the battery box for at least one second to activate the battery power output. |
| | + | ## If there is still no power output after completing the two actions above, remove the battery case, and check the batteries to see if the positive and negative polarity of the batteries are installed correctly. |
| | + | #: |
| | + | #: |
| | + | #: |
| | + | #:<div style="margin-left:0.635cm;margin-right:0cm;"></div> |
| | + | #: |
| | + | #:<div style="margin-left:0.635cm;margin-right:0cm;">If you are still having problems, please contact support@terasic.com for further assistance.</div> |
| | | | |
| - | *Memory Device
| + | = <span style="color:#000080;">Chpater2 Install Battery of Remote Control</span> = |
| - | **On-board 1GB DDR4-2400, 32-bit data width
| + | |
| - | **Two DDR4 SO-DIMM SDRAM socket
| + | |
| - | **Micro SD card socket
| + | |
| | | | |
| - | *Communication
| |
| - | **USB OTG (Mini-AB USB connector)
| |
| - | **UART-to-USB (Mini-B USB Connector)
| |
| - | **Giga Ethernet x2
| |
| - | **PCIe Gen3 x4 Cabling Socket
| |
| | | | |
| - | *Expansion Ports
| |
| - | **FMC connector
| |
| - | ***one HPC(high-pin count) FMC connector with xcvr
| |
| - | ***Adjustable VADJ:1.2V/1.5V/1.8V
| |
| | | | |
| - | *Multimedia Interface
| |
| - | ** HDMI TX and RX ports
| |
| | | | |
| - | *Clock
| + | For safety reasons, the battery of the infrared remote control is not installed in the package. If the user needs to use the remote control, user needs to buy a CR2025 Lithium Button Cell (available at most electronic and drug stores). |
| - | **Two SMA connectors for SMA Clock-In and Clock-Out
| + | |
| - | **On-board PLLs
| + | |
| | | | |
| - | *General user input/output | + | The specifications of the battery are as follows: * Type :CR2025 Lithium Button Cell |
| - | **Buttons x3 (FPGA x2, HPS x1) | + | * Voltag : 3V |
| - | **Switches x2 on FPGA | + | * Diameter : 20mm |
| - | **LEDs x3 (FPGA x2, HPS x1) | + | * Height: 25mm |
| - | **7-segment displays x2
| + | |
| | | | |
| - | *System Monitor and Control
| |
| - | **Temperature Sensor on FPGA
| |
| - | **12V Power Monitor
| |
| - | **Power Controller
| |
| - | **I2C Fan Control
| |
| | | | |
| - | *Power
| |
| - | **12V DC input
| |
| | | | |
| - | = 3 Chapter 3 Board Setting and Status component =
| + | [[Image: BAL_01_Battery_Installation_Guide_pic_33.png|100px]] |
| - | This chapter describes all the setting devices on DE10-Advanced board and their functions, such as Switches and Headers. We also will describe the function of some status LEDs. The JTAG interface will be described at the end of this chapter.
| + | |
| - | ==3.1 Board Setting Switches==
| + | |
| | | | |
| - | *'''Mode Select Switches'''
| + | Installation steps: |
| - | Mode Select Switch(SW5) is used to set the DE10-Advanced FPGA MSEL pin value.These MSEL pins determined the Configuration Mode of the FPGA.Table 3-1 list the MSEL setting for configuration scheme of FPGA,when MSEL is set to AS mode(Factory default setting),FPGA will be booted from EPCQ device(See Figure 3-1).When MSEL is set to FPP mode(See Figure 3-2),FPGA can be configured by HPS Fabric(From Micro SD Card).
| + | # Turn the infrared remote upside down and slide the battery tray out, as illustrated below. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_34.png|400px]]</div> |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_35.png|300px]]</div> |
| | + | # With the positive side facing up toward you, put in the CR2025 battery. |
| | + | #: |
| | + | #:<div style="text-align:left;">[[Image: BAL_01_Battery_Installation_Guide_pic_36.png|300px]]</div> |
| | + | # Slide the battery tray back into the infrared remote until it clicks. |
| | + | #: |
| | + | #:<div style="text-align:center;"></div> |
| | | | |
| - | :::'''Table 3-1 MSEL setting for configuration scheme of FPGA'''
| + | = <span style="color:#000080;">Chpater3 Additional Information</span> = |
| - | :{| class="wikitable"
| + | |
| - | |-
| + | |
| - | !Configuration Scheme !!SW5 MSEL[2..0] Setting !!Description
| + | |
| - | |-
| + | |
| - | |AS Mode (Factory Default) ||010|| FPGA boot from EPCQ
| + | |
| - | |-
| + | |
| - | |FPP Mode ||001|| FPGA boot from Micro SD Card
| + | |
| - | |-
| + | |
| - | |}
| + | |
| | | | |
| | | | |
| | | | |
| - | [[File:De10-advanced revc msel asmode.jpg|500px]]
| |
| | | | |
| - | :::'''Figure 3-1 The AS mode setting of SW5''' | + | <span style="color:#000080;">'''Getting Help'''</span> |
| | | | |
| - | [[File:De10-advanced revc msel fppmode.jpg|500px]]
| + | Contact us via the following methods for further technical assistance:* |
| | + | ** Terasic Inc.9F, No.176, Sec.2, Gongdao 5th Rd, East Dist, Hsinchu City, Taiwan 300-70Email : [mailto:support@terasic.com support@terasic.com]Web : [http://www.terasic.com/ www.terasic.com] |
| | | | |
| - | :::'''Figure 3-2 The FPP mode setting of SW5'''
| |
| | | | |
| - | ==3.2 Board Setting Headers==
| |
| - | *'''JTAG Interface Header'''
| |
| | | | |
| - | J17 is the header used to set the JTAG bus of FMC connector connect to JTAG interface of DE10-Advanced system.The FMC connector will not be included in the JTAG chain if the headers are set to open(See Figure 3-3). Table 3-2 list the setting of the J17 header.<br/>
| |
| | | | |
| | | | |
| | + | Revision History |
| | | | |
| - | ::::::::'''Table 3-2 JTAG Interface Headers Setting'''
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Header !!Setting !!Descriptions
| |
| - | |-
| |
| - | |J17 ||Open (Default Setting)||Disable the JTAG interface of the FMC connector into the JTAG chain
| |
| - | |}
| |
| | | | |
| - | | + | {| align="center" style="border-spacing:0;width:13.781cm;" |
| - | | + | |
| - | [[File:De10-advanced revc fmc jtag.jpg|500px]]
| + | |
| - | :::::::'''Figure 3-3 The FMC Jtag Header'''
| + | |
| - | | + | |
| - | | + | |
| - | *'''FMC_VCCIO Select Header'''
| + | |
| - | | + | |
| - | JP2 is used to set the VCCIO voltage of FPGA I/O on FMC connector, as1.2V/1.5V/1.8V are supported, the FMC connector can support various I/0 standard FMC daughtercards. Table 3-3 list the FMC_VCCIO Headers Setting.
| + | |
| - | | + | |
| - | ::'''Table 3-3 FMC_VCCIO Headers Setting'''
| + | |
| - | :{| class="wikitable"
| + | |
| - | |-
| + | |
| - | !JP2 Setting !!FMC VCCIO Voltage
| + | |
| | |- | | |- |
| - | |[[File:De10-advanced revc fmc viccio 12.jpg|100px]]||1.2V | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | '''Date''' |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | '''Version''' |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | '''Changes''' |
| | |- | | |- |
| - | |[[File:De10-advanced revc fmc viccio 15.jpg|100px]]||1.5V | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | '''2018.03.16''' |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | '''First publication''' |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |[[File:De10-advanced revc fmc viccio 18.jpg|100px]]||1.8V(Default Setting) | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| - | |}
| + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| - | | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| - | [[File:De10-advanced revc fmc vccio header.jpg|500px]]
| + | |
| - | | + | |
| - | :::::::'''Figure 3-4 The FMC VCCIO select header''' | + | |
| - | | + | |
| - | | + | |
| - | *'''PMODE Select Header'''
| + | |
| - | | + | |
| - | The USB 3.0 Controller (Cypress FX3) on the DE10-Advanced can be booted from a different sources, selected by the configuration of the PMODE header(JP4/JP5/JP6) on DE10-Advanced. Table 3-4 shows the boot options and associated settings. The default boot device is the from an serial flash via SPI interface.
| + | |
| - | | + | |
| - | | + | |
| - | ::::'''Table 3-4 PMODE Headers Setting''' | + | |
| - | :{| class="wikitable"
| + | |
| - | |-
| + | |
| - | !PMODE[2:0](JP6/JP5/JP4) Setting !!Boot Source
| + | |
| | |- | | |- |
| - | |F00||Sync ADMux (16-bit) | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |F01||Async ADMux (16-bit) | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |F11||USB boot | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |F0F||Async SRAM (16-bit) | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |F1F||I2C, On Failure, USB Boot is Enabled | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |1FF||I2C only | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| | |- | | |- |
| - | |0F1(Defualt)||SPI, On Failure, USB Boot is Enabled | + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;color:#ff0000;" | |
| - | |}
| + | | style="border-top:0.5pt solid #999999;border-bottom:0.5pt solid #999999;border-left:0.5pt solid #999999;border-right:none;padding:0cm;" | |
| - | | + | | style="border:0.5pt solid #999999;padding:0cm;" | |
| - | :*'''F''' indicates Floating | + | |
| - | | + | |
| - | | + | |
| - | | + | |
| - | [[File:De10-advanced revc pmode.jpg|500px]]
| + | |
| - | | + | |
| - | :::::::'''Figure 3-5 The PMODE select header''' | + | |
| - | | + | |
| - | ==3.3 Status LED== | + | |
| - | This section describes the all status LED for the interfaces on DE10-Advanced board. Figure 3-6 shows all the status LED on the DE10-advanced. Following are the detailed descriptions of these interface LED.
| + | |
| - | | + | |
| - | [[File:De10 advanced revc ledinterface.jpg|550px]]
| + | |
| - | | + | |
| - | ::: '''Figure 3-6 The status LED on the DE10-Advanced board
| + | |
| - | '''
| + | |
| - | | + | |
| - | *'''UART Interface'''
| + | |
| - | | + | |
| - | :Table 3-5 list the two status LEDs for UART interface.<br/> | + | |
| - | | + | |
| - | ::'''Table 3-5 Status LED for UART Interface''' | + | |
| - | :{| class="wikitable"
| + | |
| - | |-
| + | |
| - | !Component !!Reference !!Status !!Descriptions
| + | |
| - | |-
| + | |
| - | |TXD1 ||UART_TXD||ON||Transmitting
| + | |
| | |- | | |- |
| - | |RXD1 ||UART_RXD||ON||Receiving
| |
| | |} | | |} |
| | | | |
| | | | |
| - | *'''SFP Interface'''
| |
| | | | |
| - | :Table 3-6 list the four status LEDs for SFP interface.<br/>
| |
| | | | |
| - | :::'''Table 3-6 Indicator LED for SFP Interface'''
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Component !!Reference !!Status !!Descriptions
| |
| - | |-
| |
| - | |D4 ||SFPA_MOD0_PRSNT_n||ON||Indicate that the SFP module is present on the SFPA
| |
| - | |-
| |
| - | |D3 ||SFPB_MOD0_PRSNT_n||ON||Indicate that the SFP module is present on the SFPB
| |
| - | |-
| |
| - | |D2 ||SFPC_MOD0_PRSNT_n||ON||Indicate that the SFP module is present on the SFPC
| |
| - | |-
| |
| - | |D1 ||SFPD_MOD0_PRSNT_n||ON||Indicate that the SFP module is present on the SFPD
| |
| - | |}
| |
| | | | |
| | | | |
| - | *'''Ethernet Interface'''
| |
| | | | |
| - | :Table 3-7 list the four status LEDs for Ethernet interface.<br/>
| |
| - |
| |
| - | ::::'''Table 3-7 Status LED for Ethernet Interface'''
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Component !!Reference !!Status !!Descriptions
| |
| - | |-
| |
| - | |D8 ||ETH_LED_TX||ON||Transmitting
| |
| - | |-
| |
| - | |D9 ||ETH_LED_RX||ON||Receiving
| |
| - | |-
| |
| - | |D10 ||ETH_LINK1000||ON||1000Mbps Link UP
| |
| - | |-
| |
| - | |D11 ||ETH_LINK100||ON||100Mbps Link UP
| |
| - | |}
| |
| - |
| |
| - |
| |
| - | *'''Power'''
| |
| - |
| |
| - | :Table 3-8 list the two status LEDs for power.<br/>
| |
| - |
| |
| - | ::::'''Table 3-8 Status LED for Power'''
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Component !!Reference !!Status !!Descriptions
| |
| - | |-
| |
| - | |D31 ||12V~20V Power Indicator||ON||Illuminates when 12V~20V power Power Supply is active
| |
| - | |}
| |
| - |
| |
| - | *'''USB Blaster'''
| |
| - |
| |
| - | :Table 3-6 list the two status LEDs for USB Blaster interface.<br/>
| |
| - |
| |
| - | ::::'''Table 3-5 Status LED for USB Blaster Interface'''
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Component !!Reference !!Status !!Descriptions
| |
| - | |-
| |
| - | |D5 ||JTAG_TX||ON||Illuminates when JTAG interface is transmitting data
| |
| - | |-
| |
| - | |D6 ||JTAG_RX||ON||Illuminates when JTAG interface is receiving data
| |
| - | |}
| |
| - |
| |
| - | ==3.4 JTAG Interface==
| |
| - | Figure 3-2 shows the JTAG interface of DE10-Advanced.Users can access to the JTAG interface through the USB Blaster II circuit or connect external blaster to external blaster header.All the devices which implement JTAG are connect to MAX II device,and switch via MAX II internal switch logic.By using headers J17,users can include FMC connector JTAG interface in the DE10-Advanced JTAG Chain,or exclude them from the JTAG Chain.The default JTAG path for de10-advanced is: USB Blaster II ==> HPS ==> FPGA ==> (Bypass FMC connector) ==> USB Blaster II.When the External JTAG connector is connected to the external blaster, the On board's USB blaster II function will be replaced by the external blaster.<br/>
| |
| - |
| |
| - |
| |
| - | [[File:De10 advanced revc jtagchain.jpg|500px]]
| |
| - | ::::::'''Figure 3-2 JTAG interface of DE10-Advanced'''
| |
| - |
| |
| - | =Chapter 4 FPGA Fabric component=
| |
| - | ==<span style="color:#0000ff;">4.1 USB Type C Port</span>==
| |
| - | The DE10-Advanced board features one USB Type C connector. It is designed for high-speed data transmission with computers and image output applications. Figure 4-1 shows the block diagram of the connection between USB Type C port and FPGA. <br/>
| |
| - | ::::[[File:USB Type C connection.jpg|700px]]
| |
| - | :::::::Figure 4-1 Block diagram of the connection between USB Type C port and FPGA
| |
| - | As shown in Figure 4-1, it connects to FPGA through several switch circuits and USB controllers, users can switch USB Type C connector to a variety of applications as below:
| |
| - | :*USB 3.0 Device to USB Host PC
| |
| - | :*USB 2.0 OTG
| |
| - | :*DisplayPort Source Application (Need DP Source IP)
| |
| - | :*USB 3.1 Gen1 Application (Need USB 3.1 Gen1 IP)
| |
| - | We will describe the circuits diagram and these functions in detail below.
| |
| - |
| |
| - | ===4.1.1 Display Port===
| |
| - | As shown in Figure 3-2,USB type C port can connect to FPGA transceiver. Users can implement a Display port source mode IP in FPGA, the DE10-Advanced board will implement the features of display port source. <br/>
| |
| - | Through the USB Type C cable, users can connect DE10-Advanced board to the monitor which supports Display port interface. Then the image processed by FPGA can be displayed on the monitor. <br/>
| |
| - | Th display port provides data rate up to 5.4Gbps per lane and 4 lanes in total, it supports DisplayPort 1.2a Spec. <br/>
| |
| - | ::::[[File:DisplayPort Source.jpg|600px]]
| |
| - | :::::::::Figure 4-2 USB Type-C Application : DisplayPort TX Source
| |
| - |
| |
| - | :::::::::::::::::Table 4-1 DisplayPort Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |DP_REFCLK_p || AM31 || Display reference clock form PLL || LVDS
| |
| - | |-
| |
| - | |DP_TX_p[0] || AW37 || TX Lane 1 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |DP_TX_p[1] || AV39 || TX Lane 2 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |DP_TX_p[2] || AU37 || TX Lane 3 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |DP_TX_p[3] || AT39 || TX Lane 4 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |DP_AUX_p || AM22 || Display port AUX port ||DIFFERENTIAL 1.8-V SSTL CLASS I
| |
| - | |-
| |
| - | | DP_DX_SEL || AB27 || Display Port channel TX or RX(Reserve) select. <br/> DP_DX_SEL = 0 : USB TypeC in Display TX mode . <br/> DP_DX_SEL = 1(Reserve) : USB TypeC in Display RX mode ||1.8 V
| |
| - | |-
| |
| - | | DP_AUX_SEL || AC28 || AUX/DDC Selection Control Pin in Conjunction with Dx_SEL Pin ||1.8 V
| |
| - | |}
| |
| - |
| |
| - | ===4.1.2 USB 3.0 Device===
| |
| - | The DE10-Advanced board has one Cypress FX3 USB Controller(CYUSB3014).The USB controller is connected to FPGA through the programmable GPIF II interface, and connect to the external USB Type C connector, It provides USB 3.0 Device application for DE10-Advanced board. <br/>
| |
| - | As shown in Figure 4-3, users can connect FX3 USB Controller to PC through USB Type C cable, and transfer USB 3.0 data between FPGA and USB Host PC with transfer rate 320MByte/s (Using the demonstration provided by Cypress).
| |
| - | ::::[[File:FX3 USB 3.0 Controller application.jpg|600px]]
| |
| - | :::::::::Figure 4-3 FX3 USB 3.0 Controller application
| |
| - |
| |
| - | ===4.1.3 USB 2.0 OTG===
| |
| - | The Cypress FX3 USB controller also has a USB 2.0 OTG controller. It allows the DE10-Advanced board function as an OTG Host to MSC as well as HID-class devices, as shown in Figure 4-4.
| |
| - | ::::[[File:USB 2.0 OTG.jpg|500px]]
| |
| - | :::::::Figure 4-4 USB 2.0 OTG Controller application
| |
| - |
| |
| - | :::Table 4-2 FX3 USB 3.0 Controller Signal Names and Functions
| |
| - | {| class="wikitable"
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | ||USBFX3_DQ[0]
| |
| - | ||AU21
| |
| - | ||GPIF II Data Bus 0
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[1]
| |
| - | ||AW23
| |
| - | ||GPIF II Data Bus 1
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[2]
| |
| - | ||AW24
| |
| - | ||GPIF II Data Bus 2
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[3]
| |
| - | ||AW25
| |
| - | ||GPIF II Data Bus 3
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[4]
| |
| - | ||AW26
| |
| - | ||GPIF II Data Bus 4
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[5]
| |
| - | ||AV24
| |
| - | ||GPIF II Data Bus 5
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[6]
| |
| - | ||AW28
| |
| - | ||GPIF II Data Bus 6
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[7]
| |
| - | ||AW30
| |
| - | ||GPIF II Data Bus 7
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[8]
| |
| - | ||AW29
| |
| - | ||GPIF II Data Bus 8
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[9]
| |
| - | ||AV27
| |
| - | ||GPIF II Data Bus 9
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[10]
| |
| - | ||AV28
| |
| - | ||GPIF II Data Bus 10
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[11]
| |
| - | ||AU26
| |
| - | ||GPIF II Data Bus 11
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[12]
| |
| - | ||AV23
| |
| - | ||GPIF II Data Bus 12
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[13]
| |
| - | ||AU25
| |
| - | ||GPIF II Data Bus 13
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[14]
| |
| - | ||AR25
| |
| - | ||GPIF II Data Bus 14
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[15]
| |
| - | ||AP24
| |
| - | ||GPIF II Data Bus 15
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[16]
| |
| - | ||AL23
| |
| - | ||GPIF II Data Bus 16
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[17]
| |
| - | ||AM24
| |
| - | ||GPIF II Data Bus 17
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[18]
| |
| - | ||AK25
| |
| - | ||GPIF II Data Bus 18
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[19]
| |
| - | ||AM25
| |
| - | ||GPIF II Data Bus 19
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[20]
| |
| - | ||AT24
| |
| - | ||GPIF II Data Bus 20
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[21]
| |
| - | ||AR26
| |
| - | ||GPIF II Data Bus 21
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[22]
| |
| - | ||AP26
| |
| - | ||GPIF II Data Bus 22
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[23]
| |
| - | ||AP25
| |
| - | ||GPIF II Data Bus 23
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[24]
| |
| - | ||AN24
| |
| - | ||GPIF II Data Bus 24
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[25]
| |
| - | ||AN26
| |
| - | ||GPIF II Data Bus 25
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[26]
| |
| - | ||AK23
| |
| - | ||GPIF II Data Bus 26
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[27]
| |
| - | ||AJ25
| |
| - | ||GPIF II Data Bus 27
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[28]
| |
| - | ||AJ23
| |
| - | ||GPIF II Data Bus 28
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[29]
| |
| - | ||AH23
| |
| - | ||GPIF II Data Bus 29
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[30]
| |
| - | ||AR20
| |
| - | ||GPIF II Data Bus 30
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_DQ[31]
| |
| - | ||AP20
| |
| - | ||GPIF II Data Bus 31
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL0_SLCS_n
| |
| - | ||AV26
| |
| - | ||GPIF II Control Bus 0
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL1_SLWR_n
| |
| - | ||AT22
| |
| - | ||GPIF II Control Bus 1
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL2_SLOE_n
| |
| - | ||AT25
| |
| - | ||GPIF II Control Bus 2
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL3_SLRD_n
| |
| - | ||AR27
| |
| - | ||GPIF II Control Bus 3
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL4_FLAGA
| |
| - | ||AN22
| |
| - | ||GPIF II Control Bus 4
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL5_FLAGB
| |
| - | ||AN23
| |
| - | ||GPIF II Control Bus 5
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL6
| |
| - | ||AL24
| |
| - | ||GPIF II Control Bus 6
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL7_PKTEND_n
| |
| - | ||AL25
| |
| - | ||GPIF II Control Bus 7
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL8
| |
| - | ||AV21
| |
| - | ||GPIF II Control Bus 8
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL9
| |
| - | ||AV22
| |
| - | ||GPIF II Control Bus 9
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL10
| |
| - | ||AU24
| |
| - | ||GPIF II Control Bus 10
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL11_A1
| |
| - | ||AU22
| |
| - | ||GPIF II Control Bus 11
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL12_A0
| |
| - | ||AT23
| |
| - | ||GPIF II Control Bus 12
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_CTL15_INT_n
| |
| - | ||AW21
| |
| - | ||GPIF II Control Bus 15
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_RESET_n
| |
| - | ||AJ24
| |
| - | ||FX3 reset
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_PCLK
| |
| - | ||AT27
| |
| - | ||FX3 clok
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_UART_TX
| |
| - | ||AP23
| |
| - | ||USB to UART transmitter
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_UART_RX
| |
| - | ||AU27
| |
| - | ||USB to UART receiver
| |
| - | ||1.8 V
| |
| - | |-
| |
| - | ||USBFX3_OTG_ID
| |
| - | ||AG26
| |
| - | ||OTG ID pin
| |
| - | ||1.8 V
| |
| - | |}
| |
| - |
| |
| - | ===4.1.4 USB 3.1 Gen1 Application===
| |
| - | As shown in Figure 4-5, user can implement an independent or a third-party USB 3.1 Host or Device IP in FPGA. Through the circuit of FPGA and USB type C connector, the FPGA transceiver can connect to USB Type C connector and achieve the USB 3.o or USB 3.1 Host or Device application.
| |
| - | ::::[[File:Using USB 3.1 Gen 1 IP.jpg|500px]]
| |
| - | :::::::::Figure 4-5 Using USB 3.1 Gen 1 IP
| |
| - |
| |
| - | ::::Table 4-3 USB 3.1 Gen 1 application Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | ||USB_REFCLK_p
| |
| - | ||AB31
| |
| - | ||USB usb reference clock
| |
| - | ||LVDS
| |
| - | |-
| |
| - | ||USB_TX_p
| |
| - | ||AB39
| |
| - | ||USB 3.1 Interface transmitter line
| |
| - | ||HSSI Differential I/O
| |
| - | |-
| |
| - | ||USB_RX_p
| |
| - | ||AA37
| |
| - | ||USB 3.1 Interface receiver line
| |
| - | ||HSSI Differential I/O
| |
| - | |}
| |
| - |
| |
| - | ===4.1.5 Power Application===
| |
| - | The DE10-Advanced board also can be powered through USB Type C port with USB Type C power adpater. The adapter with power above 80W is recommended for DE10-Advanced board. <br/>
| |
| - | Note: Make sure the USB to UART connector (J27) is not connected before using the power adapter, or the DE10-Advanced board can't be power on normally. User can use J27 after the board is powered on.
| |
| - |
| |
| - | ==<span style="color:#0000ff;">4.2 Display Port</span>==
| |
| - | ==4.3 SFP+ Connector==
| |
| - | The development board has four independent 10G SFP+ connectors that use one transceiver channel each from the Arria 10 SoC FPGA device. These modules take in serial data from the Arria 10 SoC FPGA device and transform them to optical signals. The board includes cage assemblies for the SFP+ connectors.Figure 4-3 shows the connections between the SFP+ and Arria 10 SoC FPGA.<br/>
| |
| - | :::::[[File:De10-ad SFP.jpg|600px]]
| |
| - | ::::::::Figure 4-3 Connection between the SFP+ and Arria 10 SoC FPGA<br/><br/>
| |
| - | Table 4-3, Table 4-4, Table 4-5 and Table 4-6 list the four QSF+ connectors assignments and signal names relative to the Arria 10 SoC FPGA<br/>
| |
| - | ::::::Table 4-3 SFP+ A Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |SFPA_TXDISABLE ||PIN_AR28||Turns off and disables the transmitter output ||1.2V
| |
| - | |-
| |
| - | |SFPA_TXFAULT ||PIN_AP28 ||Transmitter fault ||1.2V
| |
| - | |-
| |
| - | |SFPA_TX_p ||PIN_AG37||Transmiter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPA_RX_p ||PIN_AD35 ||Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPA_LOS ||PIN_AN6||Signal loss indicator ||1.2V
| |
| - | |-
| |
| - | |SFPA_MOD0_PRSNT_n|| PIN_AU4||Module present ||1.2V
| |
| - | |-
| |
| - | | SFPA_RATESEL0||PIN_AM19 || Rate select 0 ||3.3V
| |
| - | |-
| |
| - | |SFPA_RATESEL1 ||PIN_AN17 || Rate select 1 ||3.3V
| |
| - | |-
| |
| - | |SFPA_TX_n ||PIN_AG36 || Transmitter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | | SFPA_RX_n ||PIN_AD34 || Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |}
| |
| - |
| |
| - | ::::::Table 4-4 SFP+ B Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |SFPB_TXDISABLE ||PIN_AU5||Turns off and disables the transmitter output ||1.2V
| |
| - | |-
| |
| - | |SFPB_TXFAULT ||PIN_AE10||Transmitter fault ||1.2V
| |
| - | |-
| |
| - | |SFPB_TX_p ||PIN_AF39||Transmiter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPB_RX_p ||PIN_AC37||Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPB_LOS ||PIN_AN12||Signal loss indicator ||1.2V
| |
| - | |-
| |
| - | |SFPB_MOD0_PRSNT_n ||PIN_AT5||Module present ||1.2V
| |
| - | |-
| |
| - | |SFPB_RATESEL0 || PIN_AR18 ||Rate select 0 ||3.3V
| |
| - | |-
| |
| - | |SFPB_RATESEL1 || PIN_AP18 || Rate select 1 ||3.3V
| |
| - | |-
| |
| - | |SFPB_TX_n || PIN_AF38 || Transmitter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPB_RX_n || PIN_AC36 || Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |}
| |
| - | ::::::Table 4-5 SFP+ C Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |SFPC_TXDISABLE ||PIN_AP30||Turns off and disables the transmitter output ||1.2V
| |
| - | |-
| |
| - | |SFPC_TXFAULT ||PIN_AP28||Transmitter fault ||1.2V
| |
| - | |-
| |
| - | |SFPC_TX_p ||PIN_AE37||Transmiter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPC_RX_p ||PIN_AC33||Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPC_LOS ||PIN_AN28||Signal loss indicator ||1.2V
| |
| - | |-
| |
| - | |SFPC_MOD0_PRSNT_n ||PIN_B27||Module present ||1.2V
| |
| - | |-
| |
| - | |SFPC_RATESEL0 || PIN_AK18 ||Rate select 0 ||3.3V
| |
| - | |-
| |
| - | |SFPC_RATESEL1 || PIN_AR17 || Rate select 1 ||3.3V
| |
| - | |-
| |
| - | |SFPC_TX_n || PIN_AE36 || Transmitter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPC_RX_n || PIN_AC32 || Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |}
| |
| - | ::::::Table 4-6 SFP+ D Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |SFPD_TXDISABLE ||PIN_AR28||Turns off and disables the transmitter output ||1.2V
| |
| - | |-
| |
| - | |SFPD_TXFAULT ||PIN_AP21||Transmitter fault ||1.2V
| |
| - | |-
| |
| - | |SFPD_TX_p ||PIN_AD39||Transmiter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPD_RX_p ||PIN_AB35||Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPD_LOS ||PIN_D26||Signal loss indicator ||1.2V
| |
| - | |-
| |
| - | |SFPD_MOD0_PRSNT_n ||PIN_AL28||Module present ||1.2V
| |
| - | |-
| |
| - | |SFPD_RATESEL0 || PIN_AH18 ||Rate select 0 ||3.3V
| |
| - | |-
| |
| - | |SFPD_RATESEL1 || PIN_AW19 || Rate select 1 ||3.3V
| |
| - | |-
| |
| - | |SFPD_TX_n || PIN_AD38 || Transmitter data ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SFPD_RX_n || PIN_AB34 || Receiver data ||HSSI DIFFERENTIAL I/O
| |
| - | |}
| |
| - |
| |
| - | ==4.4 SATA==
| |
| - | Four Serial ATA (SATA) ports are available on the FPGA development board which are computer bus standard with a primary function of transferring data between the motherboard and mass storage devices (such as hard drives, optical drives, and solid-state disks). Supporting a storage interface is just one of many different applications an FPGA can be used in storage appliances. The Arria 10 SoC device can bridge different protocols such as bridging simple bus I/Os like PCI Express (PCIe) to SATA or network interfaces such as Gigabit Ethernet (GbE) to SATA. The SATA interface supports SATA 3.0 standard with connection speed of 6 Gbps based on Arria 10 SoC device with integrated transceivers compliant to SATA electrical standards.<br/>
| |
| - | The four Serial ATA (SATA) ports include two available ports for device and two available ports for host capable of implementing SATA solution with a design that consists of both host and target(device side) functions.Figure 4-4 depicts the host and device design examples.<br/>
| |
| - | ::::[[File:SATA.jpg|400px]]<br/>
| |
| - | :::::Figure 4-4 PC and storage device connection to the Arria 10 SoC FPGA<br/>
| |
| - | The transmitter and receiver signals of the SATA ports are connected directly to the Arria 10 SoC transceiver channels to provide SATA IO connectivity to both host and target devices. To verify the functionality of the SATA host/device ports, a connection can be established between the two ports by using a SATA cable as Figure 4-5 depicts the associated signals connected.Table 4-7 lists the SATA pin assignments, signal names and functions.<br/>
| |
| - | :::[[File:SATA1.jpg|500px]]<br/>
| |
| - | ::::::::Figure 4-5 Pin connection between SATA connectors<br/>
| |
| - | :::::Table 4-7 SATA Pin Assignments,Signal Names and Functions<br/>
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name!!FPGA Pin Number!!Description!!I/O Standard
| |
| - | |-
| |
| - | |colspan="4" |Device
| |
| - | |-
| |
| - | |SATA_DEVICE_REFCLK_p || PIN_M31 || SATA Device reference clock ||LVDS
| |
| - | |-
| |
| - | | SATA_DEVICE_REFCLK_n || PIN_M30 || SATA Device reference clock ||LVDS
| |
| - | |-
| |
| - | | SATA_DEVICE_RX_n0 || PIN_D34 ||Differential receive data input after DC blocking capacitor ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | | SATA_DEVICE_RX_n1 ||PIN_B34 ||Differential receive data input after DC blocking capacitor ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | | SATA_DEVICE_TX_n0 || PIN_B38 || Differential transmit data output before DC blocking capacitor ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | | SATA_DEVICE_TX_n1 ||PIN_A36 || Differential transmit data output before DC blocking capacitor ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_DEVICE_TX_p0||PIN_B39||Differential transmit data output before DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_DEVICE_TX_p1||PIN_A37||Differential transmit data output before DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_DEVICE_RX_p0||PIN_D35||Differential receive data input after DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_DEVICE_RX_p1||PIN_B35||Differential receive data input after DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |colspan="4" |Host
| |
| - | |-
| |
| - | |SATA_HOST_REFCLK_p||PIN_AF31||SATA Host reference clock||LVDS
| |
| - | |-
| |
| - | |SATA_HOST_REFCLK_n||PIN_AF30||SATA Host reference clock||LVDS
| |
| - | |-
| |
| - | |SATA_HOST_TX_p0||PIN_AJ37||Differential transmit data output before DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_TX_p1||PIN_AH39||Differential transmit data output before DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_RX_p0||PIN_AE33||Differential receive data input after DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_RX_p1||PIN_AF35||Differential receive data input after DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_TX_n0||PIN_AJ36||Differential transmit data output before DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_TX_n1||PIN_AH38||Differential transmit data output before DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_RX_n0||PIN_AE32||Differential receive data input after DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |SATA_HOST_RX_n1||PIN_AF34||Differential receive data input after DC blocking capacitor||HSSI DIFFERENTIAL I/O
| |
| - | |}
| |
| - |
| |
| - | ==4.5 PCIe==
| |
| - | The DE10-Advanced development board features one PCIe Express downstream interfaces (x4 lane) which are designed to interface with a PC motherboard x4 slot via PCIe cable and PCIe adapter card. Utilizing built-in transceivers on a Arria 10 SoC device, it is able to provide a fully integrated PCI Express compliant solution for multi-lane (x4) applications. With the PCI Express hard IP block incorporated in the Arria 10 SoC device, it will allow users to implement simple and fast protocols, as well as saving logic resources for logic applications.
| |
| - |
| |
| - | The PCI Express interface supports complete PCI Express Gen1 at 2.5Gbps/lane, Gen2 at 5.0Gbps/lane, and Gen3 at 8.0Gbps/lane protocol stack solution compliant to PCI Express base specification 3.0 that includes PHY-MAC, Data Link, and transaction layer circuitry embedded in PCI Express hard IP blocks.
| |
| - |
| |
| - | To use PCIe interface, two external associated devices will be needed to establish a link with PC. First, a PCIe half-height add-in host card with a PCIe x4 cable connector called PCA (PCIe Cabling Adapter Card and see Figure 4-5, it will be used to plug into the PCIe slot on a mother board.<br/>
| |
| - | ::::[[File:PCA.jpg|200px]]<br/>
| |
| - | ::::Figure 4-5 PCIe Cabling Adaptor(PCA) card<br/>
| |
| - |
| |
| - | Then,a PCIe x4 cable(See Figure 4-6) will be used to connect DE10-Advanced board and PCIe add-in card, the longest length is up to 3 meters.These two associated devices are not included in DE10-Advanced board. To purchase the PCA card as well as the external cable, please refer to Terasic website [http://pca.terasic.com PCIe x4 Cable Adapter]and [http://www.terasic.com.tw/cgi-bin/page/archive.pl?Language=English&CategoryNo=77&No=687 PCIe x4 Gen.2 Cable].Table 4-8 summarizes the PCI Express pin assignments of the signal names relative to the Arria 10 SoC FPGA.PCIe pin connection is showed in Figure 4-7.<br/>
| |
| - | ::::[[File:PCA Cable.jpg|300px]]<br/>
| |
| - | ::::::Figure 4-6 PCIe External Cable<br/>
| |
| - |
| |
| - |
| |
| - |
| |
| - | [[File:PCIe.jpg|500px]]<br/>
| |
| - | :::::Figure 4-7 PCI Express Pin Connection
| |
| - |
| |
| - |
| |
| - | ::::Table 4-8 PCIe Pin Assignments,Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name!!FPGA Pin Number!!Description!!I/O Standard
| |
| - | |-
| |
| - | |PCIE_REFCLK_p||PIN_AH31||PCIe reference clock||LVDS
| |
| - | |-
| |
| - | |PCIE_TX_p[0]||PIN_AR37||PCIe Transmitter data p0||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_TX_p[1]||PIN_AP39||PCIe Transmitter data p1||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_TX_p[2]||PIN_AN37||PCIe Transmitter data p2||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_TX_p[3]||PIN_AM39||PCIe Transmitter data p3||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_RX_p[0]||PIN_AL33||PCIe Receiver data p0||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_RX_p[1]||PIN_AM35||PCIe Receiver data p1||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_RX_p[2]||PIN_AJ33||PCIe Receiver data p2||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_RX_p[3]||PIN_AK35||PCIe Receiver data p3||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |PCIE_PERST_n||PIN_AW20||PCIe present,active low||1.8 V
| |
| - | |-
| |
| - | |PCIE_WAKE_n||PIN_AL19||PCIe wake||1.8 V
| |
| - | |}
| |
| - |
| |
| - | ==<span style="color:#ff0000;">4.6 DDR4</span>==
| |
| - |
| |
| - |
| |
| - | The board supports 1GB of DDR4 SDRAM comprising of two x32bit DDR4 devices on FPGA side. The DDR4 signals are connected to the vertical I/O banks on the bottom edge of the FPGA. The DDR4 devices shipped with this board are running at 1067 MHz, for a total theoretical bandwidth of over 66Gbps. Figure 4-8 shows the connections between the DDR4 and Arria 10 SoC FPGA. Table 4-9 lists the pin assignments of DDR4 and its description with I/O standard.
| |
| - | <br/>[[File:DDR4 Device connection.jpg|500px]]
| |
| - |
| |
| - | ::Figure 4-8 The connection between DDR4 and Arria 10 SoC FPGA
| |
| - |
| |
| - | ::::Table 4-9 The pin assignments of DDR4 component and its description with I/O standard
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !FPGA Pin Number !! Signal Name !!Description !!I/O Standard
| |
| - | |-
| |
| - | |PIN_AU7 ||DDR4B_REFCLK_p|| DDR4 A port Reference Clock p ||LVDS
| |
| - | |-
| |
| - | |PIN_AJ11 ||DDR4B_A[0]|| Address [0] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AH12 || DDR4B_A[1] ||Address [1] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AP11 ||DDR4B_A[2]|| Address [2] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AN11 ||DDR4B_A[3]|| Address [3] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AM10 ||DDR4B_A[4]|| Address [4] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AM11 ||DDR4B_A[5]|| Address [5] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AP9 || DDR4B_A[6]|| Address [6] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AN9 ||DDR4B_A[7]|| Address [7] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AR10 || DDR4B_A[8]|| Address [8] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AP10 || DDR4B_A[9]|| Address [9] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AM9 ||DDR4B_A[10]|| Address [10] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AL10 ||DDR4B_A[11]|| Address [11] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AV8 ||DDR4B_A[12]|| Address [12] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AT8 ||DDR4B_A[13]|| Address [13] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AT9 ||DDR4B_A[14]|| Address [14]/WE_n ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AR7 ||DDR4B_A[15]|| Address [15]/CAS_n ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AR8 ||DDR4B_A[16]|| Address [16]/RAS_n ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AU6 ||DDR4B_BA[0]|| Bank Select [0] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AP8 ||DDR4B_BA[1]|| Bank Select [1] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AN8 ||DDR4B_BG[0]|| Bank Group Select[0] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AJ14 ||DDR4B_BG[1]|| Bank Group Select[1] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AL13 ||DDR4B_CK|| Clock p0 ||DIFFERENTIAL 1.2-V SSTL
| |
| - | |-
| |
| - | |PIN_AK13 ||DDR4B_CK_n|| Clock n0 ||DIFFERENTIAL 1.2-V SSTL
| |
| - | |-
| |
| - | |PIN_AK10 || DDR4B_CKE|| Clock Enable pin ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AE12 ||DDR4B_DQS[0] ||Data Strobe p[0] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AL7 ||DDR4B_DQS[1]||Data Strobe p[1] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AR6 ||DDR4B_DQS[2]||Data Strobe p[2] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AT2 ||DDR4B_DQS[3]||Data Strobe p[3] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF13 ||DDR4B_DQS_n[0]|| Data Strobe n[0] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK8 ||DDR4B_DQS_n[1]||Data Strobe n[1] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AP6 ||DDR4B_DQS_n[2]|| Data Strobe n[2] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AT3 ||DDR4B_DQS_n[3]|| Data Strobe n[3] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ9 || DDR4B_DQ[0] ||Data [0] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG11 || DDR4B_DQ[1]|| Data [1] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF9 || DDR4B_DQ[2]|| Data [2] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG12 || DDR4B_DQ[3]|| Data [3] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG9 || DDR4B_DQ[4]|| Data [4] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF12 || DDR4B_DQ[5]|| Data [5] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ10 ||DDR4B_DQ[6]|| Data [6] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG10 ||DDR4B_DQ[7] ||Data [7] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AL9 || DDR4B_DQ[8]|| Data [8] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH9 || DDR4B_DQ[9] ||Data [9] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK6 ||DDR4B_DQ[10]|| Data [10] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK7 ||DDR4B_DQ[11] ||Data [11] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH8 ||DDR4B_DQ[12]||Data [12] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH7 ||DDR4B_DQ[13]|| Data [13] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ8 ||DDR4B_DQ[14] ||Data [14] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AE11 ||DDR4B_DQ[15] ||Data [15] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AT4 ||DDR4B_DQ[16]|| Data [16] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AM7 ||DDR4B_DQ[17]|| Data [17] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AP5 ||DDR4B_DQ[18] ||Data [18] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AL5 ||DDR4B_DQ[19]|| Data [19] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AM5 ||DDR4B_DQ[20]||Data [20] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AM6 ||DDR4B_DQ[21]|| Data [21] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AM4 ||DDR4B_DQ[22] ||Data [22] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AR5 ||DDR4B_DQ[23]|| Data [23] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AP1 ||DDR4B_DQ[24]|| Data [24] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AR3 ||DDR4B_DQ[25] || Data [25]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AN3 ||DDR4B_DQ[26]|| Data [26] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AR1 ||DDR4B_DQ[27]|| Data [27] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AU2 ||DDR4B_DQ[28]|| Data [28] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AP4 ||DDR4B_DQ[29]|| Data [29] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AR2 ||DDR4B_DQ[30]|| Data [30] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AU1 ||DDR4B_DQ[31]|| Data [31] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF10 ||DDR4B_DM[0] || DDR3 Data Mask[0] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AL8 ||DDR4B_DM[1] || DDR3 Data Mask[1] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AN7 ||DDR4B_DM[2] || DDR3 Data Mask[2] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AN4 ||DDR4B_DM[3] || DDR3 Data Mask[3] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ13 ||DDR4B_CS_n[0] || Chip Select ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AH14 ||DDR4B_RESET_n ||Chip Reset ||1.2 V
| |
| - | |-
| |
| - | |PIN_AL12 ||DDR4A_ODT[0] || On Die Termination ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AM12 || DDR4A_PAR|| Command and Address Parity Input ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AH11 ||DDR4A_ALERT_n|| Register ALERT_n output ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AH13 ||DDR4A_ACT_n|| Activation Command Input ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AW8 ||DDR4A_RZQ|| External reference ball for output drive calibration ||1.2 V
| |
| - | |}
| |
| - |
| |
| - | The development board also supports one bank of DDR4 SDRAM SO-DIMM on FPGA side. It is wired to support a maximum capacity of 8GB with a 72-bit data bus. Using differential DQS signaling for the DDR4 SDRAM interfaces, it is capable of running at up to 1067MHz memory clock for a maximum theoretical bandwidth up to 132Gbps. Figure 4-9 shows the connections between the DDR4 SDRAM SODIMM and Arria 10 SoC FPGA. The pin assignments for DDR4 SDRAM SO-DIMM are listed in Table 4-10.
| |
| - |
| |
| - | ::[[File:DDR4 SO-DIMM Connection.jpg|400px]]
| |
| - | <br/>Figure 4-9 The connection between the DDR4 SDRAM SO-DIMM and Arria 10 SoC FPGA
| |
| - |
| |
| - | ::::Table 4-10 The pin assignments for DDR4 SDRAM SO-DIMM
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !FPGA Pin Number !! Signal Name !!Description !!I/O Standard
| |
| - | |-
| |
| - | |PIN_AB12 ||DDR4A_REFCLK_p|| DDR4 A port Reference Clock p ||LVDS
| |
| - | |-
| |
| - | |PIN_AC1 ||DDR4A_A[0]|| Address [0] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB1 || DDR4A_A[1] ||Address [1] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB4 ||DDR4A_A[2]|| Address [2] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA5 ||DDR4A_A[3]|| Address [3] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA3 ||DDR4A_A[4]|| Address [4] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA4 ||DDR4A_A[5]|| Address [5] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_Y2 || DDR4A_A[6]|| Address [6] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA2 ||DDR4A_A[7]|| Address [7] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB5 || DDR4A_A[8]|| Address [8] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB6 || DDR4A_A[9]|| Address [9] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_W5 ||DDR4A_A[10]|| Address [10] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_Y5 ||DDR4A_A[11]|| Address [11] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA9 ||DDR4A_A[12]|| Address [12] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB7 ||DDR4A_A[13]|| Address [13] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA7 ||DDR4A_A[14]|| Address [14]/WE_n ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB10 ||DDR4A_A[15]|| Address [15]/CAS_n ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB11 ||DDR4A_A[16]|| Address [16]/RAS_n ||SSTL-12
| |
| - | |-
| |
| - | |PIN_Y7 ||DDR4A_BA[0]|| Bank Select [0] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AB9 ||DDR4A_BA[1]|| Bank Select [1] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA10 ||DDR4A_BG[0]|| Bank Group Select[0] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AE2 ||DDR4A_BG[1]|| Bank Group Select[1] ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AD3 ||DDR4A_CK|| Clock p0 ||DIFFERENTIAL 1.2-V SSTL
| |
| - | |-
| |
| - | |PIN_AD4 ||DDR4A_CK_n|| Clock n0 ||DIFFERENTIAL 1.2-V SSTL
| |
| - | |-
| |
| - | |PIN_AC2 || DDR4A_CKE|| Clock Enable pin ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AE8 ||DDR4A_DQS[0] ||Data Strobe p[0] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF7 ||DDR4A_DQS[1]||Data Strobe p[1] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AN1 ||DDR4A_DQS[2]||Data Strobe p[2] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH2 ||DDR4A_DQS[3]||Data Strobe p[3] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_P1 ||DDR4A_DQS[4]||Data Strobe p[4] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_J3 ||DDR4A_DQS[5]||Data Strobe p[5] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_R5 ||DDR4A_DQS[6]||Data Strobe p[6] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_V9 ||DDR4A_DQS[7]||Data Strobe p[7] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_V2 ||DDR4A_DQS[8]||Data Strobe p[8] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AD8 ||DDR4A_DQS_n[0]|| Data Strobe n[0] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AE7 ||DDR4A_DQS_n[1]||Data Strobe n[1] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AN2 ||DDR4A_DQS_n[2]|| Data Strobe n[2] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH3 ||DDR4A_DQS_n[3]|| Data Strobe n[3] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_R1 ||DDR4A_DQS_n[4]||Data Strobe n[4] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_K3 ||DDR4A_DQS_n[5]|| Data Strobe n[5] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_R6 ||DDR4A_DQS_n[6]||Data Strobe n[6] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_W9 ||DDR4A_DQS_n[7]|| Data Strobe n[7] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_V3 ||DDR4A_DQS_n[8]||Data Strobe n[8] ||DIFFERENTIAL 1.2-V POD
| |
| - | |-
| |
| - | |PIN_AC11 || DDR4A_DQ[0] ||Data [0] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AD10 || DDR4A_DQ[1]|| Data [1] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AC9 || DDR4A_DQ[2]|| Data [2] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG7 || DDR4A_DQ[3]|| Data [3] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AD13 || DDR4A_DQ[4]|| Data [4] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AD11 || DDR4A_DQ[5]|| Data [5] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AC8 ||DDR4A_DQ[6]|| Data [6] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF8 ||DDR4A_DQ[7] ||Data [7] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AE6 || DDR4A_DQ[8]|| Data [8] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ6 || DDR4A_DQ[9] ||Data [9] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG6 ||DDR4A_DQ[10]|| Data [10] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AD6 ||DDR4A_DQ[11] ||Data [11] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG5 ||DDR4A_DQ[12]||Data [12] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK5 ||DDR4A_DQ[13]|| Data [13] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AC7 ||DDR4A_DQ[14] ||Data [14] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH6 ||DDR4A_DQ[15] ||Data [15] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK1 ||DDR4A_DQ[16]|| Data [16] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AL4 ||DDR4A_DQ[17]|| Data [17] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ4 ||DDR4A_DQ[18] ||Data [18] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AM1 ||DDR4A_DQ[19]|| Data [19] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK3 ||DDR4A_DQ[20]||Data [20] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AL2 ||DDR4A_DQ[21]|| Data [21] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ3 ||DDR4A_DQ[22] ||Data [22] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AM2 ||DDR4A_DQ[23]|| Data [23] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF2 ||DDR4A_DQ[24]|| Data [24] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH1 ||DDR4A_DQ[25] || Data [25]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG4 ||DDR4A_DQ[26]|| Data [26] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AE5 ||DDR4A_DQ[27]|| Data [27] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF3 ||DDR4A_DQ[28]|| Data [28] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AH4 ||DDR4A_DQ[29]|| Data [29] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG1 ||DDR4A_DQ[30]|| Data [30] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AF4 ||DDR4A_DQ[31]|| Data [31] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_K1 ||DDR4A_DQ[32] || Data [32]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_P4 ||DDR4A_DQ[33] || Data [33]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_N2 ||DDR4A_DQ[34]|| Data [34] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_K2 ||DDR4A_DQ[35]|| Data [35] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_M2 ||DDR4A_DQ[36]|| Data [36] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_P3 ||DDR4A_DQ[37]|| Data [37] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_N1 ||DDR4A_DQ[38] || Data [38]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_J1 ||DDR4A_DQ[39] || Data [39]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_N3 ||DDR4A_DQ[40]|| Data [40] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_P5 ||DDR4A_DQ[41]|| Data [41] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_M5 ||DDR4A_DQ[42]|| Data [42] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_R2 ||DDR4A_DQ[43]|| Data [43] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_N4 ||DDR4A_DQ[44]|| Data [44] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_P6 ||DDR4A_DQ[45]|| Data [45] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_L4 ||DDR4A_DQ[46]|| Data [46] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_R3 ||DDR4A_DQ[47]|| Data [47] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_V6 ||DDR4A_DQ[48]|| Data [48] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_T7 ||DDR4A_DQ[49]|| Data [49] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_U5 ||DDR4A_DQ[50]|| Data [50] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_U7 ||DDR4A_DQ[51]|| Data [51] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_T4 ||DDR4A_DQ[52] ||Data [52] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W6 ||DDR4A_DQ[53]|| Data [53] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_T3 ||DDR4A_DQ[54] || Data [54]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_U6 ||DDR4A_DQ[55]|| Data [55] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W8 ||DDR4A_DQ[56]|| Data [56] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y12 ||DDR4A_DQ[57]|| Data [57] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y11 ||DDR4A_DQ[58]|| Data [58] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W10 ||DDR4A_DQ[59]|| Data [59] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y13 ||DDR4A_DQ[60]|| Data [60] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y8 ||DDR4A_DQ[61] || Data [61] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y10 ||DDR4A_DQ[62]|| Data [62] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W11 ||DDR4A_DQ[63]|| Data [63] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_V1 ||DDR4A_DQ[64]|| Data [64] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y1 ||DDR4A_DQ[65]|| Data [65] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W3 ||DDR4A_DQ[66]|| Data [66] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W1 ||DDR4A_DQ[67]|| Data [67] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_Y3 ||DDR4A_DQ[68]|| Data [68] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_W4 ||DDR4A_DQ[69]|| Data [69] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_U1 ||DDR4A_DQ[70] || Data [70]||1.2-V POD
| |
| - | |-
| |
| - | |PIN_U2 ||DDR4A_DQ[71]|| Data [71] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AD9 ||DDR4A_DBI_n[0]|| Data Bus Inversion [0] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AJ5 ||DDR4A_DBI_n[1]|| Data Bus Inversion [1] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AK2 ||DDR4A_DBI_n[2]|| Data Bus Inversion [2] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AG2 ||DDR4A_DBI_n[3]|| Data Bus Inversion [3] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_L2 ||DDR4A_DBI_n[4]|| Data Bus Inversion [4] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_L3 ||DDR4A_DBI_n[5]|| Data Bus Inversion [5] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_U4 ||DDR4A_DBI_n[6]|| Data Bus Inversion [6] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_V8 ||DDR4A_DBI_n[7]|| Data Bus Inversion [7] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_V4 ||DDR4A_DBI_n[8]|| Data Bus Inversion [8] ||1.2-V POD
| |
| - | |-
| |
| - | |PIN_AE1 ||DDR4A_CS_n|| Chip Select ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AE3 ||DDR4A_RESET_n ||Chip Reset ||1.2 V
| |
| - | |-
| |
| - | |PIN_AC3 ||DDR4A_ODT|| On Die Termination ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AC6 || DDR4A_PAR|| Command and Address Parity Input ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AC12 ||DDR4A_ALERT_n|| Register ALERT_n output ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AD1 ||DDR4A_ACT_n|| Activation Command Input ||SSTL-12
| |
| - | |-
| |
| - | |PIN_T5 ||DDR4A_EVENT_n|| Chip Temperature Event ||1.2 V
| |
| - | |-
| |
| - | |PIN_AD5 || DDR4A_AC_R[0] || Reserved for QDRII+/RLDRAM3 ||SSTL-12
| |
| - | |-
| |
| - | | PIN_Y6 || DDR4A_AC_R[1] || Reserved for QDRII+/RLDRAM3 ||SSTL-12
| |
| - | |-
| |
| - | | PIN_AC4 || DDR4A_C[0] || Reserved for QDRII+/RLDRAM3 ||SSTL-12
| |
| - | |-
| |
| - | | PIN_AB2 || DDR4A_C[1] || Reserved for QDRII+/RLDRAM3 ||SSTL-12
| |
| - | |-
| |
| - | |PIN_AA8 ||DDR4A_RZQ|| External reference ball for output drive calibration ||1.2 V
| |
| - | |}
| |
| - |
| |
| - | The DDR4 SDRAM SO-DIMM socket can support many kinds of memory devices, such as standard DDR4 SO-DIMM with ECC up to 8GB at 1067MHz, Terasic QDRII+ module with DDR4 SO-DIMM interface, Terasic RLDRAM3 module with DDR4 SO-DIMM interface, as shown in Figure 4-10, Figure 4-11 and Figure 4-12.
| |
| - |
| |
| - | [[File:Standard DDR4 SO-DIMM with ECC.jpg]] [[File:Terasic QDRII+ module with DDR4 SO-DIMM interface.jpg|300px]]
| |
| - | <br/>Figure 4-10 Standard DDR4 SO-DIMM with ECC Figure 4-11 Terasic QDRII+ module with DDR4 SO-DIMM interface<br/>
| |
| - | [[File:Terasic RLDRAM3 module with DDR4 SO-DIMM interface.jpg|300px]]<br/>
| |
| - | <br/>Figure 4-12 Terasic RLDRAM3 module with DDR4 SO-DIMM interface
| |
| - |
| |
| - | ==<span style="color:#ff0000;">4.7 HDMI Transmitter and Receiver</span>==
| |
| - | The DE10-Advanced board features HDMI transmitter and receiver. <br/>
| |
| - | For HDMI transmitter,as shown in Figure 4-13. The board features a Transition Minimized Differential Signal(TMDS) retimer IC (TI:SN75DP159). Users can implement Intel or third-party IP in FPGA, HDMI image or video datas is encoded to TMDS signal and output from FPGA transceiver. The signals transmit to the retimer IC and display on HDMI monitor through HDMI connector. <br/>
| |
| - | For HDMI Receiver, it features a Redriver IC(DIDOES:PI3HDX1204B1). It transmits the input TMDS signal into FPGA, and decoded to image video datas by Intel or third-party IP, then will be processed next step. <br/>
| |
| - | ::::[[File:HDMI interface of the DE10-Advanced.png|500px]]
| |
| - | :::::::Figure 4-13 The HDMI transceiver interface of the DE10-Advanced
| |
| - | ::::Table 4-11 HDMI TX and RX port Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |HDMI_TX_CLK_p ||V39 ||TX TMDS clock channel ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_TX_D_p[0] ||U37 ||TX TMDS data channel 0 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_TX_D_p[1] ||T39 ||TX TMDS data channel 1 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_TX_D_p[2] ||R37 ||TX TMDS data channel 2 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_TX_SCL ||A28 ||I2C clock of the TX retimer IC and DCC ||1.8V
| |
| - | |-
| |
| - | |HDMI_TX_SDA ||A27 ||I2C data of the TX retimer IC and DCC ||1.8V
| |
| - | |-
| |
| - | |HDMI_HPD ||AF28 ||TX Hot Plug Detect ||1.8V
| |
| - | |-
| |
| - | |HDMI_RX_CLK_p ||Y31 ||RX TMDS clock channel ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_RX_D_p[0] ||Y35 ||RX TMDS data channel 0 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_RX_D_p[1] ||W37 ||RX TMDS data channel 1 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_RX_D_p[2] ||W33 ||RX TMDS data channel 2 ||HSSI Differential I/O
| |
| - | |-
| |
| - | |HDMI_RX_SCL ||V7 ||I2C clock of the RX redriver IC ||1.2 V
| |
| - | |-
| |
| - | |HDMI_RX_SDA ||T2 ||I2C clock of the RX redriver IC ||1.2 V
| |
| - | |-
| |
| - | |HDMI_HPD_RX ||AG27 ||RX Hot Plug Detect ||1.8V
| |
| - | |-
| |
| - | |HDMI_RX_5V_N ||C29 ||Detect if the TX terminal has 5V output ||1.8V
| |
| - | |-
| |
| - | |HDMI_REFCLK_p ||V31 ||HDMI Reference clock from on board PLL ||LVDS
| |
| - | |}
| |
| - |
| |
| - | ==4.8 Gigabit Ethernet==
| |
| - | The development board supports one RJ45 10/100/1000 base-T Ethernet using Marvell 88E1111. SGMII AC coupling interface is used between PHY and FPGA transceiver.The device is an auto-negotiating Ethernet PHY with an SGMII interface to the FPGA. The Arria 10 SoC FPGA can communicate with the LVDS interfaces at up to 1.6 Gbps, which is faster than 1.25 Gbps for SGMII. The MAC function must be provided in the FPGA for typical networking applications. The Marvell 88E1111 PHY uses 2.5-V and 1.1-V power rails and requires a 25MHz reference clock driven from a dedicated oscillator. It interfaces to an RJ-45 with internal magnetics for driving copper lines with Ethernet traffic.Figure 4-2 shows the SGMII interface between the FPGA and Marvell 88E1111 PHY. Table 4-2 lists the Ethernet PHY interface pin assignments.
| |
| - |
| |
| - | ::::[[File:Ethernet.jpg]]<br/>
| |
| - | :::::::::::Figure 4-2 SGMII Interface between FPGA and Marvell 88E1111 PHY
| |
| - |
| |
| - |
| |
| - | :Table 4-2 Ethernet PHY Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |ETH_TX_p ||PIN_AP19||SGMII TX data ||LVDS
| |
| - | |-
| |
| - | |ETH_RX_p ||PIN_AM20||SGMII RX data ||LVDS
| |
| - | |-
| |
| - | |ETH_INT_n ||PIN_AU19||Management bus interrupt ||1.8V
| |
| - | |-
| |
| - | |ETH_MDC ||PIN_AT19||Management bus control ||1.8V
| |
| - | |-
| |
| - | |ETH_MDIO ||PIN_AJ20||Management bus data ||1.8V
| |
| - | |-
| |
| - | |ETH_RST_n ||PIN_AK20||Device reset ||1.8V
| |
| - | |}
| |
| - |
| |
| - | ==4.9 FMC Connector==
| |
| - | The FPGA Mezzanine Card (FMC) interface provides a mechanism to extend the peripheral-set of an FPGA host board by means of add-on daughter cards, which can address today’s high speed signaling requirements as well as low-speed device interface support.The FMC interfaces support JTAG,clock outputs and inputs,high-speed serial I/O (transceivers),and single-ended or differential signaling.<br/>
| |
| - | There is one FMC connector on the DE10-Advanced board,it is a High Pin Count (HPC) size of connector,The HPC connector on DE10-Advanced board can provides 172 user-define,single-ended signals (include clock signals) and 10 serial transceiver pairs.Figure 4-10 is the FMC connector on DE10-Advanced board<br/>
| |
| - | ::[[File:FMC Connector.jpg|400px]]
| |
| - | :::Figure 4-10 FMC connector on DE10-Advanced board
| |
| - | :::::::::Table 4-11 FMC Connector Pin Assignments, Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |FMC_CLK2_BIDIR_p|| PIN_AW18|| FMC bidirection Clock signal ||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK2_BIDIR_n|| PIN_AV17||FMC bidirection Clock signal ||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK3_BIDIR_p|| PIN_C1|| FMC bidirection Clock signal||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK3_BIDIR_n|| PIN_D1|| FMC bidirection Clock signal ||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK_M2C_p[0]|| PIN_K5|| Clock input 0 ||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK_M2C_p[1]|| PIN_AW14|| Clock input 1 ||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK_M2C_n[0]|| PIN_L5|| Clock input 0 ||1.8 V
| |
| - | |-
| |
| - | |FMC_CLK_M2C_n[1]|| PIN_AW15||Clock input 1 ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[0]|| PIN_K12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[1]|| PIN_M12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[2]|| PIN_D10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[3]|| PIN_E12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[4]|| PIN_H13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[5]|| PIN_J11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[6]|| PIN_N13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[7]|| PIN_L13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[8]|| PIN_J14|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[9]|| PIN_F13||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[10]|| PIN_D13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[11]|| PIN_G14||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[12]|| PIN_A10||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[13]|| PIN_G12||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[14]|| PIN_A12||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[15]|| PIN_A7|| FMC data bus||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[16]|| PIN_A9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[17]|| PIN_C12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[18]|| PIN_B11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[19]|| PIN_M7|| FMC data bus||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[20]|| PIN_F10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[21]|| PIN_C9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[22]|| PIN_C8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_p[23]|| PIN_G11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[0]|| PIN_L12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[1]|| PIN_N12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[2]|| PIN_E10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[3]|| PIN_F12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[4]|| PIN_J13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[5]|| PIN_K11||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[6]|| PIN_P13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[7]|| PIN_L14|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[8]|| PIN_K13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[9]|| PIN_F14|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[10]|| PIN_E13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[11]|| PIN_H14|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[12]|| PIN_B10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[13]|| PIN_H12||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[14]|| PIN_B12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[15]|| PIN_A8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[16]|| PIN_B9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[17]|| PIN_C13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[18]|| PIN_C11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[19]|| PIN_N7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[20]|| PIN_G10||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[21]|| PIN_D9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[22]|| PIN_D8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HA_n[23]|| PIN_H11||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[0]|| PIN_E1|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[1]|| PIN_G4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[2]|| PIN_N8||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[3]|| PIN_J4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[4]|| PIN_H2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[5]|| PIN_G5|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[6]|| PIN_D3|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[7]|| PIN_A2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[8]|| PIN_B1|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[9]|| PIN_AT13||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[10]|| PIN_AM17||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[11]|| PIN_AJ16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[12]|| PIN_AW13||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[13]|| PIN_AV14|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[14]|| PIN_AP14||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[15]|| PIN_AK16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[16]|| PIN_AU16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[17]|| PIN_AT17|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[18]|| PIN_AM15|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[19]|| PIN_AR15||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[20]|| PIN_AP16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_p[21]|| PIN_AV18||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[0]|| PIN_E2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[1]|| PIN_H4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[2]|| PIN_P8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[3]|| PIN_J5||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[4]|| PIN_H3||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[5]|| PIN_H6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[6]|| PIN_E3|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[7]|| PIN_B2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[8]|| PIN_C2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[9]|| PIN_AT14||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[10]|| PIN_AL17|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[11]|| PIN_AH16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[12]|| PIN_AV13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[13]|| PIN_AU14||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[14]|| PIN_AP15||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[15]|| PIN_AK17|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[16]|| PIN_AU17|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[17]|| PIN_AT18|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[18]|| PIN_AM16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[19]|| PIN_AR16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[20]|| PIN_AN16|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_HB_n[21]|| PIN_AV19|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[0]|| PIN_A3||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[1]|| PIN_B4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[2]|| PIN_T9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[3]|| PIN_M10||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[4]|| PIN_U9|| FMC data bus||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[5]|| PIN_J10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[6]|| PIN_H8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[7]|| PIN_L9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[8]|| PIN_M9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[9]|| PIN_G6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[10]|| PIN_E8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[11]|| PIN_B6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[12]|| PIN_A5|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[13]|| PIN_D5|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[14]|| PIN_B7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[15]|| PIN_E6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[16]|| PIN_E5|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[17]|| PIN_F9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[18]|| PIN_K8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[19]|| PIN_R8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[20]|| PIN_F7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[21]|| PIN_C4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[22]|| PIN_U11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[23]|| PIN_V11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[24]|| PIN_R11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[25]|| PIN_F2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[26]|| PIN_R7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[27]|| PIN_T12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[28]|| PIN_J6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[29]|| PIN_G1|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[30]|| PIN_K7||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[31]|| PIN_P10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[32]|| PIN_M6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_p[33]|| PIN_N11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[0]|| PIN_A4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[1]|| PIN_C3|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[2]|| PIN_T10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[3]|| PIN_M11||FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[4]|| PIN_U10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[5]|| PIN_K10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[6]|| PIN_J8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[7]|| PIN_L10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[8]|| PIN_N9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[9]|| PIN_H7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[10]|| PIN_F8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[11]|| PIN_C6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[12]|| PIN_B5|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[13]|| PIN_D6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[14]|| PIN_C7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[15]|| PIN_E7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[16]|| PIN_F5|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[17]|| PIN_G9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[18]|| PIN_L8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[19]|| PIN_P9|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[20]|| PIN_G7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[21]|| PIN_D4|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[22]|| PIN_U12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[23]|| PIN_V12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[24]|| PIN_R12|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[25]|| PIN_G2|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[26]|| PIN_T8|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[27]|| PIN_T13|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[28]|| PIN_K6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[29]|| PIN_H1|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[30]|| PIN_L7|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[31]|| PIN_R10|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[32]|| PIN_N6|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_LA_n[33]|| PIN_P11|| FMC data bus ||1.8 V
| |
| - | |-
| |
| - | |FMC_GBTCLK_M2C_p[0]|| PIN_P31|| LVDS input from the installed FMC card to dedicated reference clock inputs ||LVDS
| |
| - | |-
| |
| - | |FMC_GBTCLK_M2C_p[1]|| PIN_K31|| LVDS input from the installed FMC card to dedicated reference clock inputs ||LVDS
| |
| - | |-
| |
| - | |FMC_REFCLK_p|| PIN_T31|| Reference Clock ||LVDS
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[0]|| PIN_M39|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[1]|| PIN_L37|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[2]|| PIN_K39|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[3]|| PIN_J37|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[4]|| PIN_H39|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[5]|| PIN_G37|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[6]|| PIN_F39|| Transmit channel||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[7]|| PIN_E37|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[8]|| PIN_D39|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_C2M_p[9]|| PIN_C37|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[0]|| PIN_P35|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[1]|| PIN_R33|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[2]|| PIN_M35||Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[3]|| PIN_N33|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[4]|| PIN_K35|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[5]|| PIN_L33|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[6]|| PIN_H35|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[7]|| PIN_J33|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[8]|| PIN_F35|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_DP_M2C_p[9]||PIN_G33|| Transmit channel ||HSSI DIFFERENTIAL I/O
| |
| - | |-
| |
| - | |FMC_GA[0]||PIN_E11|| FMC geographical address 0 ||1.8 V
| |
| - | |-
| |
| - | |FMC_GA[1]||PIN_AL18||FMC geographical address 1 ||1.8 V
| |
| - | |-
| |
| - | |FMC_SCL||PIN_J9||Management serial clock line ||1.8 V
| |
| - | |-
| |
| - | |FMC_SDA||PIN_F4|| Management serial data line ||1.8 V
| |
| - | |}
| |
| - |
| |
| - | ==4.10 Temperature Sensor,Fan Control and Power Monitor ==
| |
| - | The FPGA board is equipped with a temperature sensor, TMP441AIDCNT, which provides temperature sensing.This functions is accomplished by connecting the temperature sensor to the internal temperature sensing diode of the Arria 10 SoC device. The temperature status and alarm threshold registers of the temperature sensor can be programmed by a two-wire SMBus, which is connected to the Arria 10 SoC FPGA. In addition, the 7-bit POR slave address for this sensor is set to‘0011100b'.
| |
| - |
| |
| - | A 3-pin +12V fan located on J22 of the FPGA board is intended to reduce the temperature of the FPGA.The board is equipped with a Fan-Speed regulator and monitor MAX6650 with an I2C/SMBus interfaces,Users regulate and monitor the speed of fan depending on the measured system temperature.<br/>
| |
| - |
| |
| - | The DE10-Advanced has implemented a power monitor chip to monitor the board input power voltage and current.Figure 4-10 shows the connection between the power monitor chip and the Arria 10 SoC FPGA.The power monitor chip monitors both shunt voltage drops and board input power voltage allows user to monitor the total board power consumption. Programmable calibration value,conversion times,and averaging,combined with an internal multiplier,enable direct readouts of current in amperes and power in watts.Note that,the temperature sensor,fan control and power monitor share the same I2C/SMBUS.<br/>
| |
| - | [[File:Power monitor.jpg|600px]]
| |
| - | <br/>Figure 4-10 Connections between the temperature sensor/fan control/power monitor and the Arria 10 SoC FPGA
| |
| - |
| |
| - | ::Table 4-12 Temperature Sensor and Fan Speed Control Pin Assignments,Schematic Signal Names and Functions
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Schematic Signal Name !!Description !!I/O Standard !!Arria 10 SoC Pin Number
| |
| - | |-
| |
| - | |TEMPDIODEp || Positive pin of temperature diode in Arria 10 || -- ||--
| |
| - | |-
| |
| - | |TEMPDIODEn || Negative pin of temperature diode in Arria 10 || -- ||--
| |
| - | |-
| |
| - | |FPGA_I2C_SCL || SMBus clock ||1.8V ||M1
| |
| - | |-
| |
| - | |FPGA_I2C_SDA ||SMBus data ||1.8V ||M4
| |
| - | |-
| |
| - | |FAN_ALERT || Active-low ALERT input ||1.8V ||E25
| |
| - | |}
| |
| - |
| |
| - | ==<span style="color:#ff0000;">4.11 Gyroscope, Accelerometer and Magnetometer</span>==
| |
| - | The DE10-Advanced board is equipped with a Motion-Tracking device named MPU-9250. The MPU-9250 is a
| |
| - | 9-axis Motion-Tracking device that combines a 3-axis gyroscope, 3-axis accelerometer and 3-axis
| |
| - | magnetometer. Detail features of these sensors are listed below.
| |
| - | ===4.11.1 Gyroscope===
| |
| - | The MPU-9250 consists of three independent vibratory MEMS rate gyroscopes, which detect rotation
| |
| - | about the X-, Y-, and Z- Axes. When the gyros are rotated about any of the sense axes, the Coriolis
| |
| - | Effect causes a vibration that is detected by a capacitive pickoff. The resulting signal is amplified,
| |
| - | demodulated, and filtered to produce a voltage that is proportional to the angular rate. This voltage is
| |
| - | digitized using individual on-chip 16-bit Analog-to-Digital Converters (ADCs) to sample each axis. The
| |
| - | full-scale range of the gyro sensors may be digitally programmed to ±250, ±500, ±1000, or ±2000
| |
| - | degrees per second (dps). The ADC sample rate is programmable from 8,000 samples per second, down
| |
| - | to 3.9 samples per second, and user-selectable low-pass filters enable a wide range of cut-off
| |
| - | frequencies.
| |
| - | ===4.11.2 Accelerometer===
| |
| - | The MPU-9250‟s 3-Axis accelerometer uses separate proof masses for each axis. Acceleration along a
| |
| - | particular axis induces displacement on the corresponding proof mass, and capacitive sensors detect the
| |
| - | displacement differentially. The MPU-9250‟s architecture reduces the accelerometers‟ susceptibility to
| |
| - | fabrication variations as well as to thermal drift. When the device is placed on a flat surface, it will
| |
| - | measure 0g on the X- and Y-axes and +1g on the Z-axis. The accelerometers‟ scale factor is calibrated at
| |
| - | the factory and is nominally independent of supply voltage. Each sensor has a dedicated sigma-delta
| |
| - | ADC for providing digital outputs. The full scale range of the digital output can be adjusted to ±2g, ±4g,
| |
| - | ±8g, or ±16g.
| |
| - | ===4.11.3 Magnetometer===
| |
| - | The 3-axis magnetometer uses highly sensitive Hall sensor technology. The magnetometer portion of the
| |
| - | IC incorporates magnetic sensors for detecting terrestrial magnetism in the X-, Y-, and Z- Axes, a sensor
| |
| - | driving circuit, a signal amplifier chain, and an arithmetic circuit for processing the signal from each
| |
| - | sensor. Each ADC has a 16-bit resolution and a full scale range of ±4800 μT.
| |
| - | Communication with all registers of the device is performed using either I2C at 400kHz or SPI at 1MHz.
| |
| - | For applications requiring faster communications, the sensor and interrupt registers may be read using
| |
| - | SPI at 20MHz. For more detailed information of better using this chip, please refer to its datasheet
| |
| - | which is available on manufacturer‟s website or under the /datasheet folder of the system CD. Table 4-13
| |
| - | gives the pin assignment information of the LCD touch panel. For more detailed information of better
| |
| - | using this chip, please refer to its datasheet which is available on manufacturer‟s website or under the
| |
| - | /datasheet folder of the system CD.
| |
| - | :::Table 4-13 Pin names and descriptions of the MPU-9250
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |MPU_INT ||PIN_E26||Interrupt digital output ||1.8V
| |
| - | |}
| |
| - |
| |
| - | ==<span style="color:#ff0000;">4.12 User Interface (LED/7-SEG/Button/Switch)</span>==
| |
| - | The board has two push-buttons connected to the FPGA, as shown in Figure 4-11. The two push-buttons named KEY0 and KEY1 are connected directly to the Arria 10 SoC FPGA. Table 4-15 list the pin assignment of user push-buttons.
| |
| - |
| |
| - | ::[[File:DE10-Advanced pushbuttons.jpg|300px]]
| |
| - | <br/>Figure 4-11 Connections between the push-buttons and the Arria 10 SoC FPGA
| |
| - |
| |
| - | :::Table 4-15 Pin Assignment of Push-buttons
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |KEY[0] ||PIN_A24||Push-button[0] ||1.8 V
| |
| - | |-
| |
| - | |KEY[1] ||PIN_A25||Push-button[1] ||1.8 V
| |
| - | |}
| |
| - |
| |
| - | There are two slide switches connected to the FPGA, as shown in Figure 4-12. These switches are not debounced and to be used as level-sensitive data inputs to a circuit. Each switch is connected directly and individually to the FPGA. When the switch is set to the DOWN position (towards the edge of the board), it generates a low logic level to the FPGA. When the switch is set to the UP position, a high logic level is generated to the FPGA. Table 4-16 list the pin assignment of switches.
| |
| - |
| |
| - | :::[[File:DE10-Advanced Switches.jpg|300px]]
| |
| - | :Figure 4-12 Connections between the switches and the Arria 10 SoC FPGA
| |
| - |
| |
| - | :::Table 4-16 Pin Assignment of Switches
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |SW[0] ||PIN_B25||Slide Switch[0] ||1.8 V
| |
| - | |-
| |
| - | |SW[1] ||PIN_B26||Slide Switch[1] ||1.8 V
| |
| - | |}
| |
| - |
| |
| - |
| |
| - | There are also two user-controllable LEDs connected to the FPGA. Each LED is driven directly and individually by the Arria 10 SoC FPGA; driving its associated pin to a high logic level or low level to turn the LED on or off, respectively. Figure 4-13 shows the connections between LEDs and Arria 10 SoC FPGA. Table 4-17 list the pin assignment of LEDs.
| |
| - |
| |
| - | :::[[File:DE10-Advanced LEDs.jpg|300px]]
| |
| - | :Figure 4-13 Connections between the LEDs and the Arria 10 SoC FPGA
| |
| - |
| |
| - | :::Table 4-17 Pin Assignment of LEDs
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |LEDG[0] ||PIN_C26||LED [0] ||1.8 V
| |
| - | |-
| |
| - | |LEDG[1] ||PIN_B24||LED [1] ||1.8 V
| |
| - | |}
| |
| - |
| |
| - |
| |
| - | The DE10-Advanced board has two 7-segment displays. These displays are paired to display numbers in various sizes. Figure 4-14 shows the connection of seven segments (common anode) to pins on Arria 10 SoC FPGA. The segment can be turned on or off by applying a low logic level or high logic level from the FPGA, respectively.
| |
| - | Each segment in a display is indexed from 0 to 6, with corresponding positions given in Figure 4-14. Table 4-18 shows the pin assignment of FPGA to the 7-segment displays.
| |
| - |
| |
| - | :::[[File:DE10-Advanced 7-Segment.jpg|300px]]
| |
| - | :Figure 4-14 Connections between the 7-segment and the Arria 10 SoC FPGA
| |
| - |
| |
| - | :::Table 4-18 Pin Assignment of 7-segment
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |HEX0[0] ||PIN_AT32 ||Seven Segment Digit 0[0] ||1.8V
| |
| - | |-
| |
| - | |HEX0[1] ||PIN_AR32 ||Seven Segment Digit 0[1] ||1.8V
| |
| - | |-
| |
| - | |HEX0[2] ||PIN_AU32 ||Seven Segment Digit 0[2] ||1.8V
| |
| - | |-
| |
| - | |HEX0[3] ||PIN_AU30 ||Seven Segment Digit 0[3] ||1.8V
| |
| - | |-
| |
| - | |HEX0[4] ||PIN_AT30 ||Seven Segment Digit 0[4] ||1.8V
| |
| - | |-
| |
| - | |HEX0[5] ||PIN_AU29 ||Seven Segment Digit 0[5] ||1.8V
| |
| - | |-
| |
| - | |HEX0[6] ||PIN_AV29 ||Seven Segment Digit 0[6] ||1.8V
| |
| - | |-
| |
| - | |HEX1[0] ||PIN_AT28 ||Seven Segment Digit 1[0] ||1.8V
| |
| - | |-
| |
| - | |HEX1[1] ||PIN_AT29 || Seven Segment Digit 1[1] ||1.8V
| |
| - | |-
| |
| - | |HEX1[2] ||PIN_AR30 ||Seven Segment Digit 1[2] ||1.8V
| |
| - | |-
| |
| - | |HEX1[3] ||PIN_AM27 ||Seven Segment Digit 1[3] ||1.8V
| |
| - | |-
| |
| - | |HEX1[4] ||PIN_AL27 ||Seven Segment Digit 1[4] ||1.8V
| |
| - | |-
| |
| - | |HEX1[5] ||PIN_AK27 ||Seven Segment Digit 1[5] ||1.8V
| |
| - | |-
| |
| - | |HEX1[6] ||PIN_AM26 ||Seven Segment Digit 1[6] ||1.8V
| |
| - | |}
| |
| - |
| |
| - | =Chapter 5 HPS Fabric Component=
| |
| - | This section introduces the interfaces connected to the HPS section of the Arria 10 SoC FPGA. Users can access these interfaces via the HPS processor.
| |
| - | ==5.1 User Push-buttons and LEDs==
| |
| - | Similar to the FPGA, the HPS also has its set of switches, buttons, LEDs, and other interfaces connected exclusively. Users can control these interfaces to monitor the status of HPS.<br/>
| |
| - | Table 5-1 gives the pin assignment of all the LEDs, switches and push-buttons.<br/>
| |
| - | :Table 5-1 Pin Assignment of LEDs, Switches and Push-buttons
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!HPS Pin Number !!Function !!I/O Standard
| |
| - | |-
| |
| - | |HPS_KEY ||PIN_A29||I/O ||1.8 V
| |
| - | |-
| |
| - | |HPS_LED ||PIN_D29||I/O ||1.8 V
| |
| - | |}
| |
| - |
| |
| - | ==5.2 Gigabit Ethernet==
| |
| - | The board supports Gigabit Ethernet transfer by an external Micrel KSZ9031RNX PHY chip and HPS Ethernet MAC function. The KSZ9031RNX chip with integrated 10/100/1000 Mbps Gigabit Ethernet transceiver also supports RGMII MAC interface. Figure 5-1 shows the connections between the HPS, Gigabit Ethernet PHY, and RJ-45 connector. The pin assignment associated with Gigabit Ethernet interface is listed in Table 5-2. More information about the KSZ9031RNX PHY chip and its datasheet, as well as the application notes, is available on the manufacturer’s website.<br/>
| |
| - | :::[[File:HPSETH.jpg|700px]]
| |
| - | ::::::::::Figure 5-1 Connections between the HPS and Gigabit Ethernet
| |
| - | ::::::Table 5-2 Pin Assignment of Gigabit Ethernet PHY
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |HPS_ENET_GTX_CLK ||PIN_F25||GMII Transmit Clock ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_MDC ||PIN_D24||Management Data Clock Reference ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_MDIO ||PIN_C24||Management Data ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_RX_CLK ||PIN_K22||GMII and MII receive clock ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_RX_DATA[0] ||PIN_H23||GMII and MII receive data[0] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_RX_DATA[1] ||PIN_J23||GMII and MII receive data[1] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_RX_DATA[2] ||PIN_F24||GMII and MII receive data[2] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_RX_DATA[3] ||PIN_G24||GMII and MII receive data[3] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_RX_DV ||PIN_L22|| GMII and MII receive data valid ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_TX_DATA[0] ||PIN_H24||MII transmit data[0] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_TX_DATA[1] ||PIN_J24||MII transmit data[1] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_TX_DATA[2] ||PIN_M22||MII transmit data[2] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_TX_DATA[3] ||PIN_M21||MII transmit data[3] ||1.8V
| |
| - | |-
| |
| - | |HPS_ENET_TX_EN ||PIN_G25||GMII and MII transmit enable ||1.8V
| |
| - | |}
| |
| - |
| |
| - | There are four LEDs, two green LEDs(LEDG) and two yellow LEDs(LEDY), which represent the status of Ethernet PHY (KSZ9031RNX). The LED control signals are connected to the LEDs on the RJ45 connector. The state and definition of LEDG and LEDY are listed in Table 5-3. For instance, the connection from board to Gigabit Ethernet is established once the LEDG lights on.
| |
| - | :::Table 5-3 State and Definition of LED Mode Pins
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | ! colspan="2" style="text-align: center;" | LED (State) !!colspan="2" style="text-align: center;" | LED (Definition) !!rowspan="2" |Link /Activity
| |
| - | |-
| |
| - | !LEDG !!LEDY !!LEDG !!LEDY
| |
| - | |-
| |
| - | |H ||H ||OFF ||OFF ||Link off
| |
| - | |-
| |
| - | |L ||H ||ON ||OFF ||1000 Link / No Activity
| |
| - | |-
| |
| - | |Toggle ||H ||Blinking ||OFF ||1000 Link / Activity (RX, TX)
| |
| - | |-
| |
| - | |H ||L ||OFF ||ON ||100 Link / No Activity
| |
| - | |-
| |
| - | |H ||Toggle ||OFF ||Blinking ||100 Link / Activity (RX, TX)
| |
| - | |-
| |
| - | |L ||L ||ON ||ON ||10 Link/ No Activity
| |
| - | |-
| |
| - | |Toggle ||Toggle ||Blinking ||Blinking ||10 Link / Activity (RX, TX)
| |
| - | |}
| |
| - |
| |
| - | ==5.3 UART to USB==
| |
| - | The board has one UART interface connected for communication with the HPS. This interface doesn’t support HW flow control signals. The physical interface is implemented by UART-USB onboard bridge from a FT232R chip to the host with an USB Mini-B connector. More information about the chip is available on the manufacturer’s website, or in the directory \Datasheets\UART TO USB of DE10-Advanced system CD. Figure 5-2 shows the connections between the HPS, FT232R chip, and the USB Mini-B connector. Table 5-4 lists the pin assignment of UART interface connected to the HPS.<br/>
| |
| - | :::[[File:DE10-Advanced uart.jpg|600px]]
| |
| - | ::::::Figure 5-2 Connections between the HPS and USB Mini-B connector
| |
| - | ::::Table 5-4 Pin Assignment of UART Interface
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |USB_PD_SCL ||PIN_AJ19||I2C Serial Clock ||1.8V
| |
| - | |-
| |
| - | |USB_PD_SDA ||PIN_AV16||I2C Serial Data ||1.8V
| |
| - | |-
| |
| - | |I2C_INT ||PIN_AH27||inter-integrated circuit ||1.8V
| |
| - | |-
| |
| - | |HPS_RXD_M ||PIN_L20||HPS UART Receiver ||1.8V
| |
| - | |-
| |
| - | |HPS_TXD_M ||PIN_J19||HPS UART Transmitter ||1.8V
| |
| - | |}
| |
| - |
| |
| - | ==5.4 Micro SD Card Socket==
| |
| - | The board supports Micro SD card interface with x4 data lines. It serves not only an external storage for the HPS, but also an alternative boot option for DE10-Standard board. Figure 5-3 shows signals connected between the HPS and Micro SD card socket. Table 5-5 lists the pin assignment of Micro SD card socket to the HPS.<br/>
| |
| - | ::::[[File:DE10-AD-SD.jpg|600px]]
| |
| - | ::::::::Figure 5-3 Connections between the FPGA and SD card socket
| |
| - |
| |
| - | ::::Table 5-5 Pin Assignment of Micro SD Card Socket
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |SD_CLK || PIN_K18 ||HPS SD Clock ||1.8V
| |
| - | |-
| |
| - | |SD_CMD || PIN_F22 ||HPS SD Command Line ||1.8V
| |
| - | |-
| |
| - | |SD_DATA0 || PIN_J18 ||HPS SD Data[0] ||1.8V
| |
| - | |-
| |
| - | |SD_DATA1 || PIN_E23 ||HPS SD Data[1] ||1.8V
| |
| - | |-
| |
| - | |SD_DATA2 || PIN_G21 ||HPS SD Data[2] ||1.8V
| |
| - | |-
| |
| - | |SD_DATA3 ||PIN_H21 ||HPS SD Data[3] ||1.8V
| |
| - | |}
| |
| - |
| |
| - | ==5.5 USB OTG==
| |
| - | The board has one USB 2.0 type-A port with a SMSC USB3320 controller. The SMSC USB3320 device in 32-pin QFN RoHS Compliant package. This device supports UTMI+ Low Pin Interface (ULPI), which communicates with the USB 2.0 controller in HPS. The PHY operates in Host mode by connecting the ID pin of USB3320 to ground. When operating in Host mode, the device is powered by the USB type-A port. Figure 5-4 shows the connections of USB PTG PHY to the HPS. Table 5-6 lists the pin assignment of USB OTG PHY to the HPS.<br/>
| |
| - | ::::[[File:DE10-AD-OTG.jpg|700px]]
| |
| - | ::::::::Figure 5-4 Connections between the HPS and USB OTG PHY
| |
| - |
| |
| - | ::::::Table 5-6 Pin Assignment of USB OTG PHY
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !Signal Name !!FPGA Pin Number !!Description !!I/O Standard
| |
| - | |-
| |
| - | |HPS_USB_CLKOUT || PIN_L25 || 60MHz Reference Clock Output ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[0] ||PIN_K25 || HPS USB_DATA[0] ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[1] ||PIN_G26 || HPS USB_DATA[1]||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[2] || PIN_E27 || HPS USB_DATA[2]||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[3] ||PIN_F27 || HPS USB_DATA[3]||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[4] || PIN_L24 || HPS USB_DATA[4] ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[5] ||PIN_M24 ||HPS USB_DATA[5] ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[6] ||PIN_K23 || HPS USB_DATA[6]||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DATA[7] || PIN_L23 ||HPS USB_DATA[7] ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_DIR || PIN_J25 ||Direction of the Data Bus ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_NXT || PIN_H26 ||Direction of the Data Bus ||1.8V
| |
| - | |-
| |
| - | |HPS_USB_STP || PIN_M25 || Stop Data Stream on the Bus ||1.8V
| |
| - | |}
| |
| - |
| |
| - | ==5.6 GPIO Header ==
| |
| - | There is a 2x5 pin header(2.54mm) on the DE10-Advanced which connected to six FPGA HPS farbric GPIOs.These I/Os can be used as GPIO that are directly controlled by HPS. Or it can be used as SPI interface (HPS_DIO[11:8]), using the SPI master controller in HPS to communicate with other SPI devices.
| |
| - |
| |
| - | =Chapter 6 System Clocks=
| |
| - | Figure 6-1 shows the Clock Net connected to FPGA on DE 10-Advanced.
| |
| - |
| |
| - | The Si5350c provides the fixed system frequencies to FPGA, HPS and other important components. There are four 50 MHz connected to the dedicated clock pins of the FPGA, which can be used by PLL for clock multiplier or frequency division. In addition, there are Programmable PLL (CDCM6280, BGA/FXXXXX) available for providing the clocks to the peripherals on the board, such as HDMI and communication interfaces.
| |
| - | There is a default clock when power on, it also supports the users to change the frequency via I2C interface for special requirement.
| |
| - |
| |
| - |
| |
| - | :::[[File:De10 advanced revc clock net connected to FPGA.jpg|600px]]
| |
| - |
| |
| - | :::::::::Figure 6-1 System Clock in the DE10-Advanced
| |
| - |
| |
| - |
| |
| - | :::[[File:Figure 6-2.png|550px]]
| |
| - |
| |
| - | ::::::::Figure 6-2 shows the default settings for different PLLs
| |
| - |
| |
| - | =Chapter 7 Power and Reset=
| |
| - | ==7.1 Power Tree==
| |
| - | Figure 7-1 is DE10-Advanced Power Tree.
| |
| - |
| |
| - | DE10-Advanced can be supplied by the 12V power adapter in the package, or external connecting to USB type C as power supply.
| |
| - |
| |
| - | The maximum load of the system supports is 60W (FPGA usage is 92 %) by our test.
| |
| - |
| |
| - | However, please note that it is different FPGA efficient for different project. This result is only for a reference.
| |
| - |
| |
| - | [[File:Figure 7-1.png|550px]]
| |
| - |
| |
| - | Figure 7-1 The power tree of the DE10-advanced
| |
| - |
| |
| - | =Chapter 8 DE10-Advanced System Builder=
| |
| - | This chapter describes how users can create a custom design project with the tool named DE10-Advanced System Builder.<br/>
| |
| - | ==8.1 Introduction==
| |
| - | The System Builder is a Windows based software utility. It is designed to help users create a Quartus Prime project for the FPGA board within minutes. The Quartus Prime project files generated include:<br/>
| |
| - | :*Quartus Prime Project File (.qpf)
| |
| - | :*Quartus Prime Setting File (.qsf)
| |
| - | :*Top-Level Design File (.v)
| |
| - | :*Synopsis Design Constraints file (.sdc)
| |
| - | :*Pin Assignment Document (.htm)
| |
| - | The above files generated by the DE10-Advanced System Builder can also prevent occurrence of situations that are prone to compilation error when users manually edit the top-level design file or place pin assignment. The common mistakes users may encounter are:
| |
| - | :*Board is damaged due to incorrect bank voltage setting or pin assignment
| |
| - | :*Board is malfunctioned because of wrong device chosen, declaration of pin location or direction is incorrect or forgotten
| |
| - | :*Performance degradation due to improper pin assignment
| |
| - | ==8.2 General Design Flow==
| |
| - | This section will introduce the general design flow to build a project for the FPGA board via the System Builder. The general design flow is illustrated in the Figure 8-1. <br/>
| |
| - | :::::[[File:DE10-Advanced System Builder.jpg|350px]]<br/>
| |
| - | ::::::Figure 8-1 The general design flow of building a project <br/>
| |
| - | Users should launch System Builder and create a new project according to their design requirements. When users complete the settings, the System Builder will generate two major files which include top-level design file (.v) and the Quartus Prime setting file(.qsf). <br/>
| |
| - | The top-level design file contains top-level Verilog wrapper for users to add their own design/logic. The Quartus Prime setting file contains information such as FPGA device type, top-level pin assignment, and I/O standard for each user-defined I/O pin. <br/>
| |
| - | Finally, Quartus Prime programmer must be used to download SOF file to the FPGA board using JTAG interface.
| |
| - |
| |
| - | ==8.3 Using DE10-Advanced System Builder==
| |
| - | This section provides the detailed procedures on how to use the DE10-Advanced System Builder.
| |
| - | ===8.3.1 Install and Launch the DE10-Advanced System Builder===
| |
| - | The DE10-Advanced System Builder is located in the directory: “Tools\SystemBuilder” of the DE10-Advanced System CD. Users can copy the entire folder to a host computer without installing the utility. A window will pop up, as shown in Figure 8-2, after executing the DE10-Advanced SystemBuilder.exe on the host computer.
| |
| - | ::::[[File:System builder 1.jpg|500px]]
| |
| - | :::::::Figure 8-2 The GUI of DE10-Advanced System Builder
| |
| - |
| |
| - | ===8.3.2 Enter Project Name===
| |
| - | Enter the project name in the circled area, as shown in Figure 8-3. The project name typed in will be assigned automatically as the name of your top-level design entity.
| |
| - | ::::[[File:System builder 2.jpg|500px]]
| |
| - | :::::::Figure 8-3 Project Name in the System Builder window
| |
| - |
| |
| - | ===8.3.3 Select Top File Type===
| |
| - | The system builder can generate Verilog or VHDL Quartus top file according to users’requirement. Users can select their desired file type in the Top File Type list-box shown in Figure 8-4.
| |
| - | ::::[[File:System builder 3.jpg|500px]]
| |
| - | :::::::Figure 8-4 Top File Type in the System Builder window
| |
| - |
| |
| - | ===8.3.4 System Configuration===
| |
| - | Users are given the flexibility of enabling their choices of components connected to the FPGA under System Configuration, as shown in Figure 8-5. Each component of the FPGA board is listed to be enabled or disabled according to users’ needs. If a component is
| |
| - | enabled, the System Builder will automatically generate the associated pin assignments including its pin name, pin location, pin direction, and I/O standards.
| |
| - | Note: The pin assignments for some components (e.g. DDR4 and SFP+) require associated controller codes in the Quartus project or it would result in compilation error. Hence please do not select them if they are not needed in the design.
| |
| - | ::::[[File:System builder 4.jpg|500px]]
| |
| - | :::::::::Figure 8-5 System Configuration group
| |
| - |
| |
| - | ===8.3.5 FMC Expansion===
| |
| - | If users connect any compatible Terasic FMC-based daughter cards to the FMC connectoron DE10-Advanced, the DE10-Advanced System Builder can generate a project that include the corresponding module, as shown in Figure 8-6. It will also generate the associated pin assignment automatically, including pin name, pin location, pin direction, and I/O standard.<br/>
| |
| - | The “Prefix Name” is an optional feature that denotes the pin name of the daughter card assigned in your design. Users may leave this field blank.
| |
| - | ::::[[File:System builder 5.jpg|500px]]
| |
| - | ::::::::::Figure 8-6 FMC expansion group
| |
| - |
| |
| - | ===8.3.6 Programmable Clock Generator===
| |
| - | There are some oscillators on-board (Si5350C,CDCM6208) that provide reference clocks for the following signals:
| |
| - | :*HDMI_REFCLK
| |
| - | :*SFP_REFCLK
| |
| - | :*FMC_REFCLK
| |
| - | :*DP_REFCLK
| |
| - | :*USB_REFCLK
| |
| - |
| |
| - | To use these clock, users can select the desired frequency on the Programmable Oscillator group, as shown in Figure 8-7. DDR4, or SFP+ must be checked before users can start to specify the desired frequency in the programmable oscillators. As the Quartus project is created, System Builder automatically generates the associated controller according to users’ desired frequency in Verilog which facilitates users’ implementation as no additional control code is required to configure the programmable oscillator. <br/>
| |
| - | Note: If users need to dynamically change the frequency, they would need to modify the generated control code themselves.
| |
| - | ::::[[File:System builder 6.jpg|500px]]
| |
| - | :::::::::Figure 8-7 External programmable oscillators
| |
| - |
| |
| - | ===8.3.7 Project Setting Management===
| |
| - | The System Builder also provides functions to restore default setting, load a setting, and save board configuration file, as shown in Figure 8-8. Users can save the current board configuration information into a .cfg file and load it into the System Builder.
| |
| - | ::::[[File:System builder 7.jpg|500px]]
| |
| - | ::::::::::Figure 8-8 Project Settings
| |
| - |
| |
| - | ===8.3.8 Project Generation===
| |
| - | When users press the Generate button, the DE10-Advanced System Builder will generate the corresponding Quartus Prime files and documents as listed in Table 8‑1.
| |
| - | ::Table 8-1 The file generated by DE10-Advanced System Builder
| |
| - | :{| class="wikitable"
| |
| - | |-
| |
| - | !No. !!File Name !!Descriptions
| |
| - | |-
| |
| - | |1 ||<Project name>.v||Top Verilog Quartus Prime File
| |
| - | |-
| |
| - | |2 ||<Project name>.qpf||Quartus Prime Project File
| |
| - | |-
| |
| - | |3 ||<Project name>.qsf||Quartus Prime Setting File
| |
| - | |-
| |
| - | |4 ||<Project name>.sdc||Quartus Prime Synopsis Design Constraints File
| |
| - | |-
| |
| - | |5 ||<Project name>.htm||Pin Assignment Document
| |
| - | |}
| |
| | | | |
| - | Users can use Quartus Prime software to add custom logic into the project and compile the project to generate the SRAM Object File. (.sof).
| + | <div style="text-align:center;"> </div> |
The Self-Balancing Robot’s main power source is a lithium battery pack with three 12 V series 18650 batteries. For safety reasons, the lithium batterie are not included in the development kit. Users need to purchase three 18650 3.7V Lithium-Ion battery for the robot. The following linked products can be used as a reference for purchase:
For safety reasons, the battery of the infrared remote control is not installed in the package. If the user needs to use the remote control, user needs to buy a CR2025 Lithium Button Cell (available at most electronic and drug stores).
The specifications of the battery are as follows: * Type :CR2025 Lithium Button Cell