Self-Balancing Robot 由两块板卡组成:
- DE10-Nano SoC FPGA 开发板:带 ARM 处理器,可运行 Linux 系统;集成了 110K 逻辑单元,可以实现逻辑控制。另外还有串口,网口,GPIO 口等外围电路接口。
- 驱动板:主要是接收來自 DE10-Nano 的马达控制信号,通过板子上的马达驱动芯片去控制马达。 另外还能接收來自 Wifi/ Bluetooth 以及 IR 等协议控制信号,并传回 DE10-Nano 进行处理。同时板子还通过一些 sensor 提供许多系統数据给 DE10-Nano, 如 Motion track,电池电量,还有超声波模块传回的距离信息等。
产品详细的规格如下:
DE10-Nano 板:
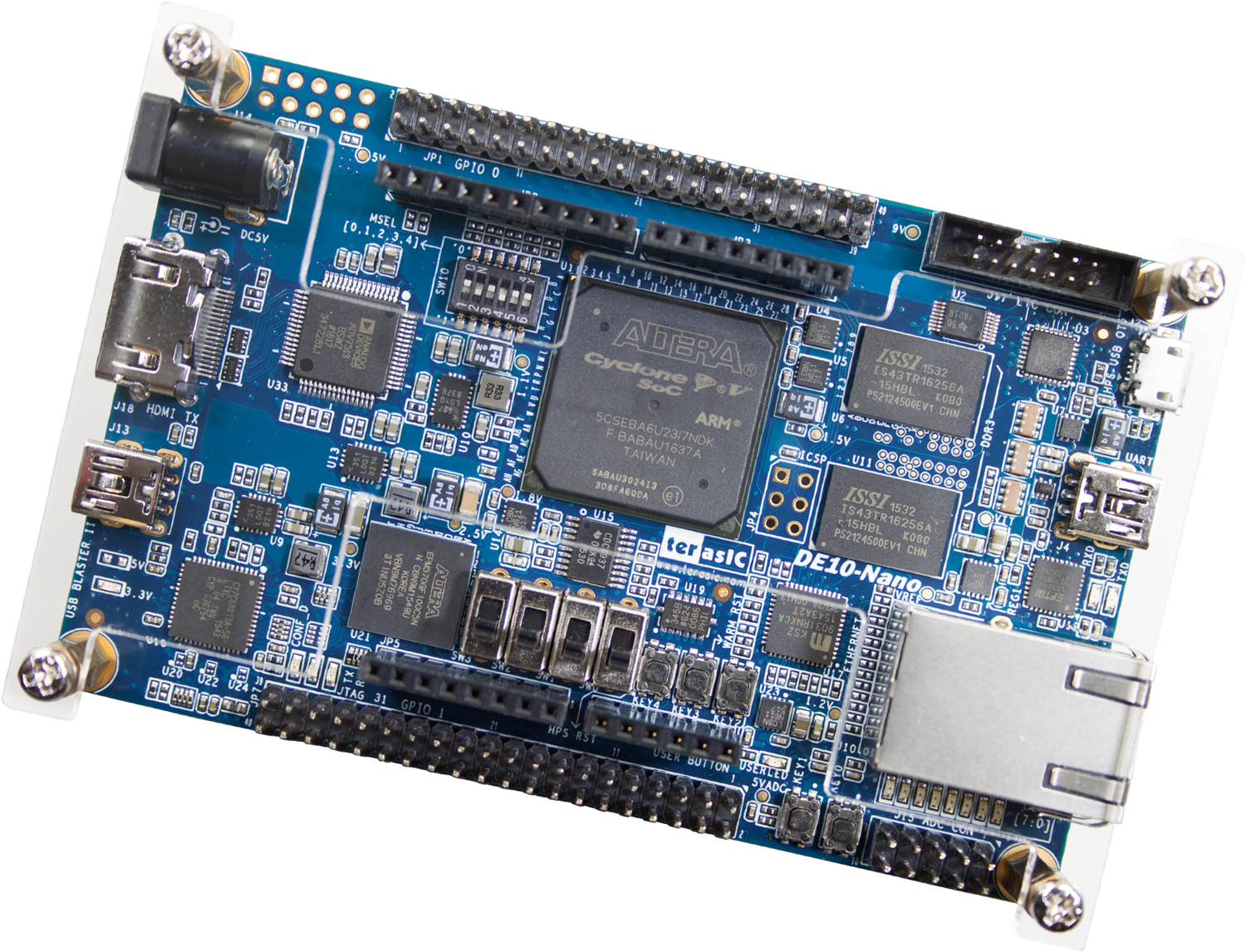
- FPGA Device
- FPGA 器件为 Intel Cyclone® V SE 5CSEBA6U23I7 (110K LEs)
- 序列配置器件 – EPCS64 (revision B2 or later)
- 内建 USB-Blaster II 电路,JTAG 模式
- HDMI 输出,兼容于 DVI v1.0 及 HDCP v1.4
- 2 个按钮
- 4 个拨码开关
- 8 个绿色使用者 LED 灯
- 来自时钟产生器的三个 50MHz 时钟源
- 两个 40-pin 的扩展槽
- 一个 Arduino 扩展槽 (兼容 Uno R3),可联机 Arduino 背板。
- 一个10-pin 的模拟输入扩展槽(跟 Arduino 的模拟输入埠是复用关系)。
- A/D 转换器, FPGA 端 4-pin SPI 接口
硬核處理系統(HPS)
- HPS (Hard Processor System)
- 800MHz ARM Cortex-A9 双核处理器
- 1GB DDR3 SDRAM (32 位数据总线)
- 支持 1G 以太网 PHY 的 RJ45 接口
- USB OTG 埠,采用 USB Micro-AB 型联机器
- 微型 SD 卡槽
- 加速计(G-Sensor, I2C 界面+中断 )
- 一个串行埠转 USB 口,采用 USB Mini-B 型接口
- 一个热启动按钮和一个启动按钮
- 一个用户按钮和一个用户 LED 灯
- LTC 2x7 扩展槽
驱动板:
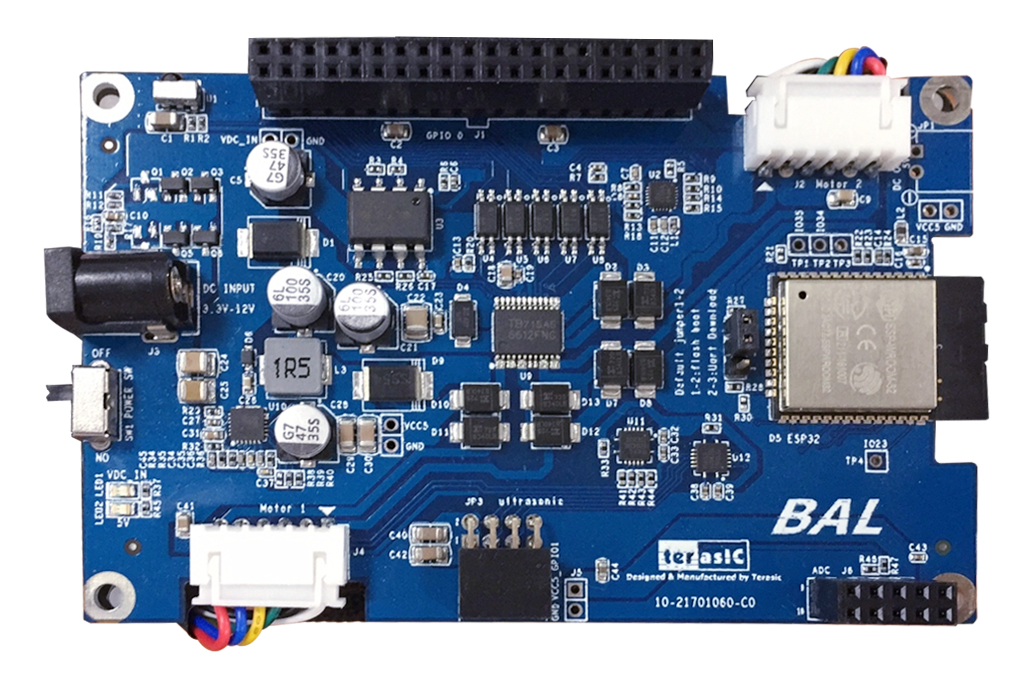
- 直流电机驱动连接器
- 蓝牙/WiFi 模块
- 2*20 GPIO 槽用于连接 DE10-Nano 板子
- 红外接收器
- ADC 电源控制
- 超声波模块连接器
- 12V 电源输入
- 5V 电压输出到 FPGA 板
- 6 轴(Gyro+Accelerometer)MEMS 动向跟踪器