The Self-Balancing Robot is composed of two boards:
- DE10-Nano SoC FPGA board: with ARM processor, can run Linux system; 110K LEs integrated, can implement logic control. The board supports Uart, Ethernet, GPIO and many other peripheral interfaces.
- Motor Driver Board: It receives the motor control signal from DE10-Nano board and drive the motor through motor driver chip on Motor Driver Board. It can also receive control signals from Wi-Fi/Bluetooth and IR Receiver, and feed back the signals to DE10-Nano for further processing. In addition, the board also provides many system data to DE10-Nano, such as motion track, battery power voltage value, and distance information from ultrasonic module.
The robot Specifications details:
DE10-Nano Board:
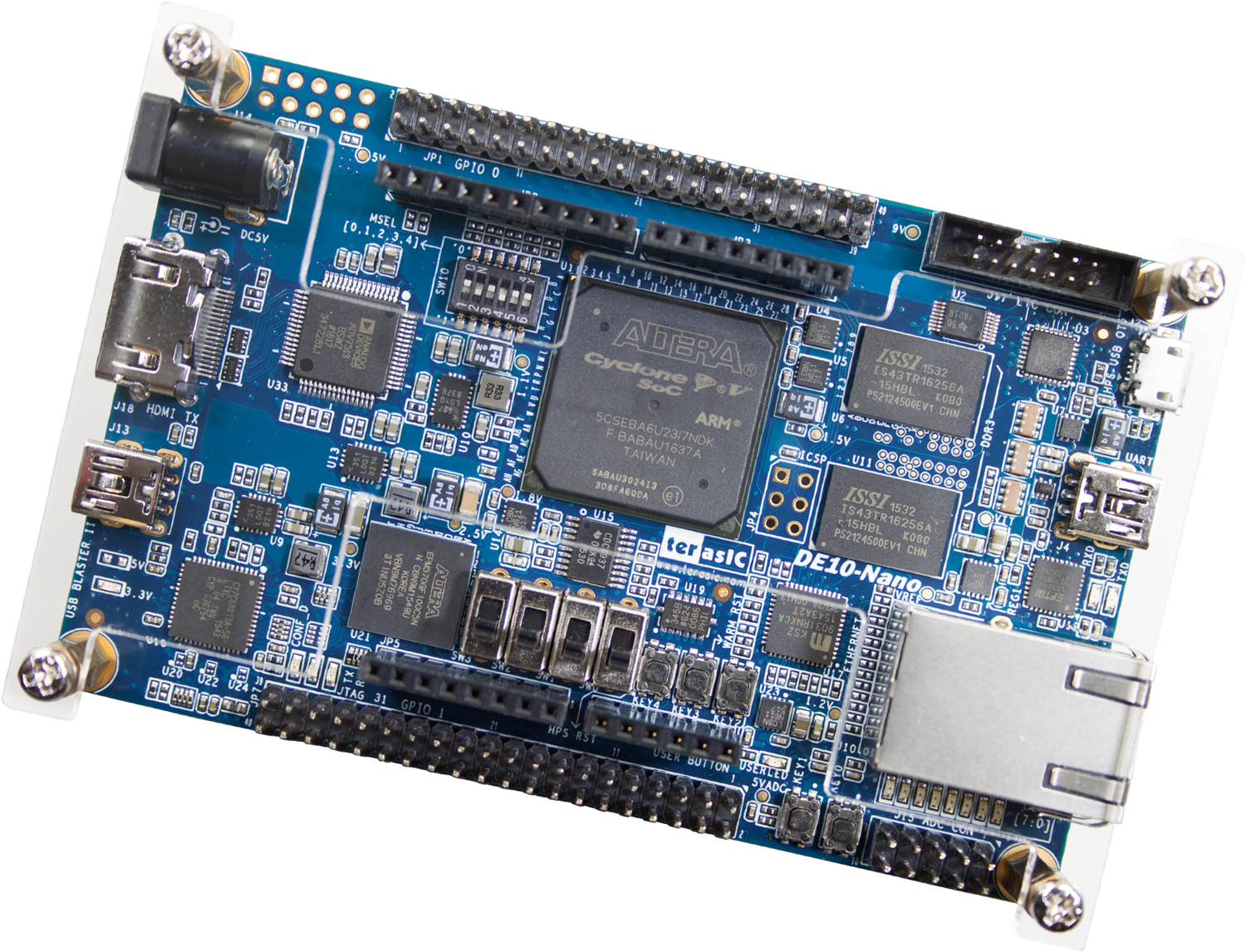
- FPGA Device
- Intel Cyclone® V SE 5CSEBA6U23I7 device (110K LEs)
- Serial configuration device – EPCS64 (revision B2 or later)
- USB-Blaster II onboard for programming; JTAG Mode
- HDMI TX, compatible with DVI 1.0 and HDCP v1.4
- 2 push-buttons
- 4 slide switches
- 8 green user LEDs
- Three 50MHz clock sources from the clock generator
- Two 40-pin expansion headers
- One Arduino expansion header (Uno R3 compatibility), can be connected with Arduino shields
- One 10-pin Analog input expansion header (shared with Arduino Analog input)
- A/D converter, 4-pin SPI interface with FPGA
- HPS (Hard Processor System)
- 800MHz Dual-core ARM Cortex-A9 processor
- 1GB DDR3 SDRAM (32-bit data bus)
- 1 Gigabit Ethernet PHY with RJ45 connector
- USB OTG Port, USB Micro-AB connector
- Micro SD card socket
- Accelerometer (I2C interface + interrupt)
- UART to USB, USB Mini-B connector
- Warm reset button and cold reset button
- One user button and one user LED
- LTC 2x7 expansion header
Motor Driver Board:
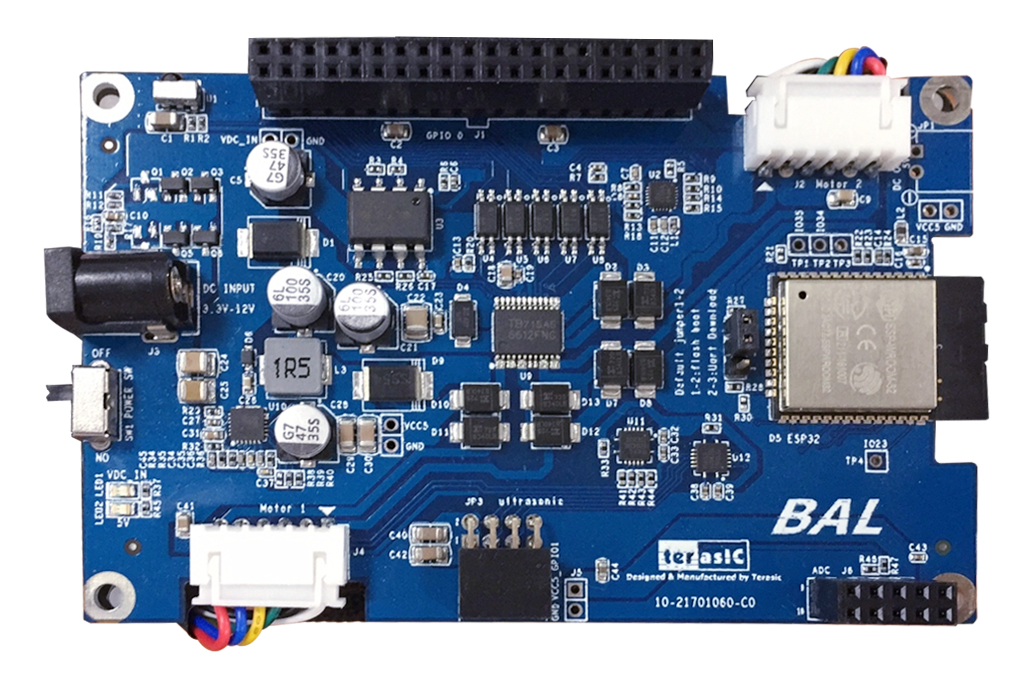
- DC Motor Driver and Connectors
- Wi-Fi/Bluetooth module
- 2X20 GPIO Connector to the DE10-Nano Board
- IR Receiver
- ADC Power Monitor
- Ultrasonic Connector
- 12V Power Input
- 5V Power Output to FPGA Board
- Six-Axis (Gyro+Accelerometer) MEMS Motion Tracking